Product Description
Product Description
Feature:
A. High power range from 75W to 15KW
B. Dia: 57mm-180mm
C. Easy for speed & direction adjustment
D. Rich stock and fast shipping time in 10 working days
E. Strong stability for driver/controller
F. Lifetime above continuous 10000 hours
G. IP65 protection rank is available for us
H. Above 90% enery efficiency motor is available
I. 3D file is available if customers needed
K.High-performance and stable matching driver and controller
Δ Kindly remind: As different customers may need different motor parameter for fitting your equipment. If below motor can’t fit your need, please kindly send inquiry to us with information for rated power or torque,rated speed, and rated voltage for our new size drawing making for you. CLICK HERE to contact me. Thanks a lot!
Dimensions (Unit: mm )
Mounting screws are included with gear head.
Gearbox Specification:
|
Gearbox Type |
PLF90/PLE90 |
ZPLF90/ZPLE90 |
||||
|
Deceleration stage |
1 |
2 |
3 |
1 |
2 |
3 |
|
Length |
153 |
176.5 |
199.5 |
187.5 |
222 |
245.5 |
|
Reduction ratio |
Level 1: 3, 4, 5, 7, 10 |
|||||
110mm 1500W BLDC motor with PLF90/PLE90 Planetary Gearbox
Other Motor Specification Form:
Δ Motor interface, Voltage, Speed can be customized.
For More Details Of Product Specifications,
Please Click here contact us for updated size drawing if you have other different parameter needed. Thanks
More Motor Flange Size
Δ More Motor Flange Size to choose, if you need other size. Welcome to contact us to custom.
BLDC Motor with Gearbox Range
Company Profile
DMKE motor was founded in China, HangZhou city,Xihu (West Lake) Dis. district, in 2009. After 12 years’ creativity and development, we became 1 of the leading high-tech companies in China in dc motor industry.
We specialize in high precision micro dc gear motors, brushless motors, brushless controllers, dc servo motors, dc servo controllers etc. And we produce brushless dc motor and controller with wide power range from 5 watt to 20 kilowatt; also dc servo motor power range from 50 watt to 10 kilowatt. They are widely used in automatic guided vehicle , robots, lifting equipment,cleaning machine, medical equipment, packing machinery, and many other industrial automatic equipments.
With a plant area of 4000 square meters, we have built our own supply chain with high quality control standard and passed ISO9001 certificate of quality system.
With more than 10 engineers for brushless dc motor and controllers’ research and development, we own strong independent design and development capability. Custom-made motors and controllers are widely accepted by us. At the same time, we have engineers who can speak fluent English. That makes we can supply intime after-sales support and guidance smoothly for our customers.
Our motors are exported worldwide, and over 80% motors are exported to Europe, the United States, Saudi Arabia, Australia, Korea etc. We are looking CHINAMFG to establishing long-term business relationship together with you for mutual business success.
FAQ
Q1: What kind motors you can provide?
A1: For now, we mainly provide permanent magnet brushless dc motor, dc gear motor, micro dc motor, planetary gear motor, dc servo motor, brush dc motors, with diameter range from 16 to 220mm,and power range from 5W to 20KW.
Q2: Is there a MOQ for your motors?
A2: No. we can accept 1 pcs for sample making for your testing,and the price for sample making will have 10% to 30% difference than bulk price based on different style.
Q3: Could you send me a price list?
A3: For all of our motors, they are customized based on different requirements like power, voltage, gear ratio, rated torque and shaft diameter etc. The price also varies according to different order qty. So it’s difficult for us to provide a price list.
If you can share your detailed specification and order qty, we’ll see what offer we can provide.
Q4: Are you motors reversible?
A4: Yes, nearly all dc and ac motor are reversible. We have technical people who can teach how to get the function by different wire connection.
Q5: Is it possible for you to develop new motors if we provide the tooling cost?
A5: Yes. Please kindly share the detailed requirements like performance, size, annual quantity, target price etc. Then we’ll make our evaluation to see if we can arrange or not.
Q6:How about your delivery time?
A6: For micro brush dc gear motor, the sample delivery time is 2-5 days, bulk delivery time is about 15-20 days, depends on the order qty.
For brushless dc motor, the sample deliver time is about 10-15 days; bulk time is 15-20 days.
Pleasecontact us for final reference.
Q7:What’s your warranty terms?
A6: One year
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Universal, Industrial, Household Appliances, Power Tools, Pump |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Compound |
| Function: | Control, Driving |
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
| Samples: |
US$ 366.3/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
|
|
|---|

What are the maintenance requirements for gear motors, and how can longevity be maximized?
Gear motors, like any mechanical system, require regular maintenance to ensure optimal performance and longevity. Proper maintenance practices help prevent failures, minimize downtime, and extend the lifespan of gear motors. Here are some maintenance requirements for gear motors and ways to maximize their longevity:
1. Lubrication:
Regular lubrication is essential for gear motors to reduce friction, wear, and heat generation. The gears, bearings, and other moving parts should be properly lubricated according to the manufacturer’s recommendations. Lubricants should be selected based on the motor’s specifications and operating conditions. Regular inspection and replenishment of lubricants, as well as periodic oil or grease changes, should be performed to maintain optimal lubrication levels and ensure long-lasting performance.
2. Inspection and Cleaning:
Regular inspection and cleaning of gear motors are crucial for identifying any signs of wear, damage, or contamination. Inspecting the gears, bearings, shafts, and connections can help detect any abnormalities or misalignments. Cleaning the motor’s exterior and ventilation channels to remove dust, debris, or moisture buildup is also important in preventing malfunctions and maintaining proper cooling. Any loose or damaged components should be repaired or replaced promptly.
3. Temperature and Environmental Considerations:
Monitoring and controlling the temperature and environmental conditions surrounding gear motors can significantly impact their longevity. Excessive heat can degrade lubricants, damage insulation, and lead to premature component failure. Ensuring proper ventilation, heat dissipation, and avoiding overloading the motor can help manage temperature effectively. Similarly, protecting gear motors from moisture, dust, chemicals, and other environmental contaminants is vital to prevent corrosion and damage.
4. Load Monitoring and Optimization:
Monitoring and optimizing the load placed on gear motors can contribute to their longevity. Operating gear motors within their specified load and speed ranges helps prevent excessive stress, overheating, and premature wear. Avoiding sudden and frequent acceleration or deceleration, as well as preventing overloading or continuous operation near the motor’s maximum capacity, can extend its lifespan.
5. Alignment and Vibration Analysis:
Proper alignment of gear motor components, such as gears, couplings, and shafts, is crucial for smooth and efficient operation. Misalignment can lead to increased friction, noise, and premature wear. Regularly checking and adjusting alignment, as well as performing vibration analysis, can help identify any misalignment or excessive vibration that may indicate underlying issues. Addressing alignment and vibration problems promptly can prevent further damage and maximize the motor’s longevity.
6. Preventive Maintenance and Regular Inspections:
Implementing a preventive maintenance program is essential for gear motors. This includes establishing a schedule for routine inspections, lubrication, and cleaning, as well as conducting periodic performance tests and measurements. Following the manufacturer’s guidelines and recommendations for maintenance tasks, such as belt tension checks, bearing replacements, or gear inspections, can help identify and address potential issues before they escalate into major failures.
By adhering to these maintenance requirements and best practices, the longevity of gear motors can be maximized. Regular maintenance, proper lubrication, load optimization, temperature control, and timely repairs or replacements of worn components contribute to the reliable operation and extended lifespan of gear motors.
Are there environmental benefits to using gear motors in certain applications?
Yes, there are several environmental benefits associated with the use of gear motors in certain applications. Gear motors offer advantages that can contribute to increased energy efficiency, reduced resource consumption, and lower environmental impact. Here’s a detailed explanation of the environmental benefits of using gear motors:
1. Energy Efficiency:
Gear motors can improve energy efficiency in various ways:
- Torque Conversion: Gear reduction allows gear motors to deliver higher torque output while operating at lower speeds. This enables the motor to perform tasks that require high torque, such as lifting heavy loads or driving machinery with high inertia, more efficiently. By matching the motor’s power characteristics to the load requirements, gear motors can operate closer to their peak efficiency, minimizing energy waste.
- Controlled Speed: Gear reduction provides finer control over the motor’s rotational speed. This allows for more precise speed regulation, reducing the likelihood of energy overconsumption and optimizing energy usage.
2. Reduced Resource Consumption:
The use of gear motors can lead to reduced resource consumption and environmental impact:
- Smaller Motor Size: Gear reduction allows gear motors to deliver higher torque with smaller, more compact motors. This reduction in motor size translates to reduced material and resource requirements during manufacturing. It also enables the use of smaller and lighter equipment, which can contribute to energy savings during operation and transportation.
- Extended Motor Lifespan: The gear mechanism in gear motors helps reduce the load and stress on the motor itself. By distributing the load more evenly, gear motors can help extend the lifespan of the motor, reducing the need for frequent replacements and the associated resource consumption.
3. Noise Reduction:
Gear motors can contribute to a quieter and more environmentally friendly working environment:
- Noise Dampening: Gear reduction can help reduce the noise generated by the motor. The gear mechanism acts as a noise dampener, absorbing and dispersing vibrations and reducing overall noise emission. This is particularly beneficial in applications where noise reduction is important, such as residential areas, offices, or noise-sensitive environments.
4. Precision and Control:
Gear motors offer enhanced precision and control, which can lead to environmental benefits:
- Precise Positioning: Gear motors, especially stepper motors and servo motors, provide precise positioning capabilities. This accuracy allows for more efficient use of resources, minimizing waste and optimizing the performance of machinery or systems.
- Optimized Control: Gear motors enable precise control over speed, torque, and movement. This control allows for better optimization of processes, reducing energy consumption and minimizing unnecessary wear and tear on equipment.
In summary, using gear motors in certain applications can have significant environmental benefits. Gear motors offer improved energy efficiency, reduced resource consumption, noise reduction, and enhanced precision and control. These advantages contribute to lower energy consumption, reduced environmental impact, and a more sustainable approach to power transmission and control. When selecting motor systems for specific applications, considering the environmental benefits of gear motors can help promote energy efficiency and sustainability.
What is a gear motor, and how does it combine the functions of gears and a motor?
A gear motor is a type of motor that incorporates gears into its design to combine the functions of gears and a motor. It consists of a motor, which provides the mechanical power, and a set of gears, which transmit and modify this power to achieve specific output characteristics. Here’s a detailed explanation of what a gear motor is and how it combines the functions of gears and a motor:
A gear motor typically consists of two main components: the motor and the gear system. The motor is responsible for converting electrical energy into mechanical energy, generating rotational motion. The gear system, on the other hand, consists of multiple gears with different sizes and tooth configurations. These gears are meshed together in a specific arrangement to transmit and modify the output torque and speed of the motor.
The gears in a gear motor serve several functions:
1. Torque Amplification:
One of the primary functions of the gear system in a gear motor is to amplify the torque output of the motor. By using gears with different sizes, the input torque can be effectively multiplied or reduced. This allows the gear motor to provide higher torque at lower speeds or lower torque at higher speeds, depending on the gear arrangement. This torque amplification is beneficial in applications where high torque is required, such as in heavy machinery or vehicles.
2. Speed Reduction or Increase:
The gear system in a gear motor can also be used to reduce or increase the rotational speed of the motor output. By utilizing gears with different numbers of teeth, the gear ratio can be adjusted to achieve the desired speed output. For example, a gear motor with a higher gear ratio will output lower speed but higher torque, whereas a gear motor with a lower gear ratio will output higher speed but lower torque. This speed control capability allows for precise matching of motor output to the requirements of specific applications.
3. Directional Control:
Gears in a gear motor can be used to control the direction of rotation of the motor output shaft. By employing different combinations of gears, such as spur gears, bevel gears, or worm gears, the rotational direction can be changed. This directional control is crucial in applications where bidirectional movement is required, such as in conveyor systems or robotic arms.
4. Load Distribution:
The gear system in a gear motor helps distribute the load evenly across multiple gears, which reduces the stress on individual gears and increases the overall durability and lifespan of the motor. By sharing the load among multiple gears, the gear motor can handle higher torque applications without putting excessive strain on any particular gear. This load distribution capability is especially important in heavy-duty applications that require continuous operation under demanding conditions.
By combining the functions of gears and a motor, gear motors offer several advantages. They provide torque amplification, speed control, directional control, and load distribution capabilities, making them suitable for various applications that require precise and controlled mechanical power. Gear motors are commonly used in industries such as robotics, automotive, manufacturing, and automation, where reliable and efficient power transmission is essential.


editor by CX 2024-05-15
China high quality Excited Long Life bicycle brushless gear electric hub bldc 48v dc motor a/c vacuum pump
Product Description
Introduction
ZD Leader has a wide range of micro motor production lines in the industry, including DC Motor, AC Motor, Brushless Motor, Planetary Gear Motor, Drum Motor, Planetary Gearbox, RV Reducer and Harmonic Gearbox etc. Through technical innovation and customization, we help you create outstanding application systems and provide flexible solutions for various industrial automation situations.
• Model Selection
Our professional sales representive and technical team will choose the right model and transmission solutions for your usage depend on your specific parameters.
• Drawing Request
If you need more product parameters, catalogues, CAD or 3D drawings, please contact us.
• On Your Need
We can modify standard products or customize them to meet your specific needs.
Product Parameters
DC Gear Motor
| MOTOR FRAME SIZE | 60 mm / 70mm / 80mm / 90mm / 104mm |
| MOTOR TYPE | Brushed |
| OUTPUT POWER | 10W / 15W / 25W / 40W / 60W / 90W / 120 W / 140W / 180W / 200W / 300W(Can Be Customized) |
| OUTPUT SHAFT | 8mm / 10mm / 12mm / 15mm ; Round Shaft, D-Cut Shaft, Key-Way Shaft (Can Be Customized) |
| Voltage type | 12V,24V,90V,220V |
| Accessories | Electric Brake / Encoder |
| GEARBOX FRAME SIZE | 60 mm / 70mm / 80mm / 90mm / 104mm |
| Gear Ratio | 3K-200K |
| Type Of Pinion | GN Type / GU Type |
| Gearbox Type | Regular Square Case gearbox / Right Angle Gearbox / L Type Gearbox |
Type Of DC Motor
Other Products
Company Profile
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Universal, Industrial, Household Appliances |
|---|---|
| Operating Speed: | Constant Speed |
| Excitation Mode: | Excited |
| Function: | Control, Driving |
| Casing Protection: | Closed Type |
| Structure and Working Principle: | Brush |
| Customization: |
Available
|
|
|---|

Are gear motors suitable for both heavy-duty industrial applications and smaller-scale uses?
Yes, gear motors are suitable for both heavy-duty industrial applications and smaller-scale uses. Their versatility and ability to provide torque multiplication make them valuable in a wide range of applications. Here’s a detailed explanation of why gear motors are suitable for both types of applications:
1. Heavy-Duty Industrial Applications:
Gear motors are commonly used in heavy-duty industrial applications due to their robustness and ability to handle high loads. Here are the reasons why they are suitable for such applications:
- Torque Multiplication: Gear motors are designed to provide high torque output, making them ideal for applications that require substantial force to move or operate heavy machinery, conveyors, or equipment.
- Load Handling: Industrial settings often involve heavy loads and demanding operating conditions. Gear motors, with their ability to handle high loads, are well-suited for tasks such as lifting, pulling, pushing, or driving heavy materials or equipment.
- Durability: Heavy-duty industrial applications require components that can withstand harsh environments, frequent use, and demanding operating conditions. Gear motors are typically constructed with durable materials and designed to withstand heavy vibrations, shock loads, and temperature variations.
- Speed Reduction: Many industrial processes require the reduction of motor speed to achieve the desired output speed. Gear motors offer precise speed reduction capabilities through gear ratios, allowing for optimal control and operation of machinery and equipment.
2. Smaller-Scale Uses:
While gear motors excel in heavy-duty industrial applications, they are also suitable for smaller-scale uses across various industries and applications. Here’s why gear motors are well-suited for smaller-scale uses:
- Compact Size: Gear motors are available in compact sizes, making them suitable for applications with limited space or small-scale machinery, devices, or appliances.
- Torque and Power Control: Even in smaller-scale applications, there may be a need for torque multiplication or precise power control. Gear motors can provide the necessary torque and power output for tasks such as precise positioning, controlling speed, or driving small loads.
- Versatility: Gear motors come in various configurations, such as parallel shaft, planetary, or worm gear designs, offering flexibility to match specific requirements. They can be adapted to different applications, including robotics, medical devices, automotive systems, home automation, and more.
- Efficiency: Gear motors are designed to be efficient, converting the electrical input power into mechanical output power with minimal losses. This efficiency is advantageous for smaller-scale applications where energy conservation and battery life are critical.
Overall, gear motors are highly versatile and suitable for both heavy-duty industrial applications and smaller-scale uses. Their ability to provide torque multiplication, handle high loads, offer precise speed control, and accommodate various sizes and configurations makes them a reliable choice in a wide range of applications. Whether it’s powering large industrial machinery or driving small-scale automation systems, gear motors provide the necessary torque, control, and durability required for efficient operation.

Can gear motors be used for precise positioning, and if so, what features enable this?
Yes, gear motors can be used for precise positioning in various applications. The combination of gear mechanisms and motor control features enables gear motors to achieve accurate and repeatable positioning. Here’s a detailed explanation of the features that enable gear motors to be used for precise positioning:
1. Gear Reduction:
One of the key features of gear motors is their ability to provide gear reduction. Gear reduction refers to the process of reducing the output speed of the motor while increasing the torque. By using the appropriate gear ratio, gear motors can achieve finer control over the rotational movement, allowing for more precise positioning. The gear reduction mechanism enables the motor to rotate at a slower speed while maintaining higher torque, resulting in improved accuracy and control.
2. High Resolution Encoders:
Many gear motors are equipped with high-resolution encoders. An encoder is a device that measures the position and speed of the motor shaft. High-resolution encoders provide precise feedback on the motor’s rotational position, allowing for accurate position control. The encoder signals are used in conjunction with motor control algorithms to ensure precise positioning by monitoring and adjusting the motor’s movement in real-time. The use of high-resolution encoders greatly enhances the gear motor’s ability to achieve precise and repeatable positioning.
3. Closed-Loop Control:
Gear motors with closed-loop control systems offer enhanced positioning capabilities. Closed-loop control involves continuously comparing the actual motor position (as measured by the encoder) with the desired position and making adjustments to minimize any position error. The closed-loop control system uses feedback from the encoder to adjust the motor’s speed, direction, and torque, ensuring accurate positioning even in the presence of external disturbances or variations in the load. Closed-loop control enables gear motors to actively correct for position errors and maintain precise positioning over time.
4. Stepper Motors:
Stepper motors are a type of gear motor that provides excellent precision and control for positioning applications. Stepper motors operate by converting electrical pulses into incremental steps of movement. Each step corresponds to a specific angular displacement, allowing precise positioning control. Stepper motors offer high step resolution, allowing for fine position adjustments. They are commonly used in applications that require precise positioning, such as robotics, 3D printers, and CNC machines.
5. Servo Motors:
Servo motors are another type of gear motor that excels in precise positioning tasks. Servo motors combine a motor, a feedback device (such as an encoder), and a closed-loop control system. They offer high torque, high speed, and excellent positional accuracy. Servo motors are capable of dynamically adjusting their speed and torque to maintain the desired position accurately. They are widely used in applications that require precise and responsive positioning, such as industrial automation, robotics, and camera pan-tilt systems.
6. Motion Control Algorithms:
Advanced motion control algorithms play a crucial role in enabling gear motors to achieve precise positioning. These algorithms, implemented in motor control systems or dedicated motion controllers, optimize the motor’s behavior to ensure accurate positioning. They take into account factors such as acceleration, deceleration, velocity profiling, and jerk control to achieve smooth and precise movements. Motion control algorithms enhance the gear motor’s ability to start, stop, and position accurately, reducing position errors and overshoot.
By leveraging gear reduction, high-resolution encoders, closed-loop control, stepper motors, servo motors, and motion control algorithms, gear motors can be effectively used for precise positioning in various applications. These features enable gear motors to achieve accurate and repeatable positioning, making them suitable for tasks that require precise control and reliable positioning performance.

How does the gearing mechanism in a gear motor contribute to torque and speed control?
The gearing mechanism in a gear motor plays a crucial role in controlling torque and speed. By utilizing different gear ratios and configurations, the gearing mechanism allows for precise manipulation of these parameters. Here’s a detailed explanation of how the gearing mechanism contributes to torque and speed control in a gear motor:
The gearing mechanism consists of multiple gears with varying sizes, tooth configurations, and arrangements. Each gear in the system engages with another gear, creating a mechanical connection. When the motor rotates, it drives the rotation of the first gear, which then transfers the motion to subsequent gears, ultimately resulting in the output shaft’s rotation.
Torque Control:
The gearing mechanism in a gear motor enables torque control through the principle of mechanical advantage. The gear system utilizes gears with different numbers of teeth, known as gear ratio, to adjust the torque output. When a smaller gear (pinion) engages with a larger gear (gear), the pinion rotates faster than the gear but exerts more force or torque. This results in torque amplification, allowing the gear motor to deliver higher torque at the output shaft while reducing the rotational speed. Conversely, if a larger gear engages with a smaller gear, torque reduction occurs, resulting in higher rotational speed at the output shaft.
By selecting the appropriate gear ratio, the gearing mechanism effectively adjusts the torque output of the gear motor to match the requirements of the application. This torque control capability is essential in applications that demand high torque for heavy lifting or overcoming resistance, as well as applications that require lower torque but higher rotational speed.
Speed Control:
The gearing mechanism also contributes to speed control in a gear motor. The gear ratio determines the relationship between the rotational speed of the input shaft (driven by the motor) and the output shaft. When a gear motor has a higher gear ratio (more teeth on the driven gear compared to the driving gear), it reduces the output speed while increasing the torque. Conversely, a lower gear ratio increases the output speed while reducing the torque.
By choosing the appropriate gear ratio, the gearing mechanism allows for precise speed control in a gear motor. This is particularly useful in applications that require specific speed ranges or variations, such as conveyor systems, robotic movements, or machinery that needs to operate at different speeds for different tasks. The speed control capability of the gearing mechanism enables the gear motor to match the desired speed requirements of the application accurately.
In summary, the gearing mechanism in a gear motor contributes to torque and speed control by utilizing different gear ratios and configurations. It enables torque amplification or reduction, depending on the gear arrangement, allowing the gear motor to deliver the required torque output. Additionally, the gear ratio also determines the relationship between the rotational speed of the input and output shafts, providing precise speed control. These torque and speed control capabilities make gear motors versatile and suitable for a wide range of applications in various industries.
editor by CX 2024-04-16
China Good quality CHINAMFG 48V Gear Inrunner Outrunner BLDC Robot Joint Arm Frameless Torque Motor Brushless vacuum pump ac
Product Description
Product Description
Motor Size Drawing:
Robot Joint Frameless DC Motor Specification:
| Maximum Rated Torque | 2.85 Nm |
| Continuous Stall Torque | 0.442 Nm |
| Max Speed | 7300rpm @ 0.663Nm |
| Speed | 2000rpm @ 0.436 Nm |
| Phase | Y connected |
| Voltage | DC 48v |
| Hall and thermistor added | |
For More Details Of Product Specifications,
Please Click here contact us for updated size drawing if you have other different parameter needed. Thanks
More Motor To Choose
BLDC Motor with Gearbox Range
Company Profile
DMKE motor was founded in China, HangZhou city,Xihu (West Lake) Dis. district, in 2009. After 12 years’ creativity and development, we became 1 of the leading high-tech companies in China in dc motor industry.
We specialize in high precision micro dc gear motors, brushless motors, brushless controllers, dc servo motors, dc servo controllers etc. And we produce brushless dc motor and controller with wide power range from 5 watt to 20 kilowatt; also dc servo motor power range from 50 watt to 10 kilowatt. They are widely used in automatic guided vehicle , robots, lifting equipment,cleaning machine, medical equipment, packing machinery, and many other industrial automatic equipments.
With a plant area of 4000 square meters, we have built our own supply chain with high quality control standard and passed ISO9001 certificate of quality system.
With more than 10 engineers for brushless dc motor and controllers’ research and development, we own strong independent design and development capability. Custom-made motors and controllers are widely accepted by us. At the same time, we have engineers who can speak fluent English. That makes we can supply intime after-sales support and guidance smoothly for our customers.
Our motors are exported worldwide, and over 80% motors are exported to Europe, the United States, Saudi Arabia, Australia, Korea etc. We are looking CHINAMFG to establishing long-term business relationship together with you for mutual business success.
FAQ
Q1: What kind motors you can provide?
A1: For now, we mainly provide permanent magnet brushless dc motor, dc gear motor, micro dc motor, planetary gear motor, dc servo motor, brush dc motors, with diameter range from 16 to 220mm,and power range from 5W to 20KW.
Q2: Is there a MOQ for your motors?
A2: No. we can accept 1 pcs for sample making for your testing,and the price for sample making will have 10% to 30% difference than bulk price based on different style.
Q3: Could you send me a price list?
A3: For all of our motors, they are customized based on different requirements like power, voltage, gear ratio, rated torque and shaft diameter etc. The price also varies according to different order qty. So it’s difficult for us to provide a price list.
If you can share your detailed specification and order qty, we’ll see what offer we can provide.
Q4: Are you motors reversible?
A4: Yes, nearly all dc and ac motor are reversible. We have technical people who can teach how to get the function by different wire connection.
Q5: Is it possible for you to develop new motors if we provide the tooling cost?
A5: Yes. Please kindly share the detailed requirements like performance, size, annual quantity, target price etc. Then we’ll make our evaluation to see if we can arrange or not.
Q6:How about your delivery time?
A6: For micro brush dc gear motor, the sample delivery time is 2-5 days, bulk delivery time is about 15-20 days, depends on the order qty.
For brushless dc motor, the sample deliver time is about 10-15 days; bulk time is 15-20 days.
Pleasecontact us for final reference.
Q7:What’s your warranty terms?
A6: One year
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Universal, Industrial, Power Tools, Robot |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Compound |
| Function: | Control, Driving |
| Casing Protection: | Open Type |
| Number of Poles: | 4 |
| Samples: |
US$ 150/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
|
|
|---|
What are the maintenance requirements for gear motors, and how can longevity be maximized?
Gear motors, like any mechanical system, require regular maintenance to ensure optimal performance and longevity. Proper maintenance practices help prevent failures, minimize downtime, and extend the lifespan of gear motors. Here are some maintenance requirements for gear motors and ways to maximize their longevity:
1. Lubrication:
Regular lubrication is essential for gear motors to reduce friction, wear, and heat generation. The gears, bearings, and other moving parts should be properly lubricated according to the manufacturer’s recommendations. Lubricants should be selected based on the motor’s specifications and operating conditions. Regular inspection and replenishment of lubricants, as well as periodic oil or grease changes, should be performed to maintain optimal lubrication levels and ensure long-lasting performance.
2. Inspection and Cleaning:
Regular inspection and cleaning of gear motors are crucial for identifying any signs of wear, damage, or contamination. Inspecting the gears, bearings, shafts, and connections can help detect any abnormalities or misalignments. Cleaning the motor’s exterior and ventilation channels to remove dust, debris, or moisture buildup is also important in preventing malfunctions and maintaining proper cooling. Any loose or damaged components should be repaired or replaced promptly.
3. Temperature and Environmental Considerations:
Monitoring and controlling the temperature and environmental conditions surrounding gear motors can significantly impact their longevity. Excessive heat can degrade lubricants, damage insulation, and lead to premature component failure. Ensuring proper ventilation, heat dissipation, and avoiding overloading the motor can help manage temperature effectively. Similarly, protecting gear motors from moisture, dust, chemicals, and other environmental contaminants is vital to prevent corrosion and damage.
4. Load Monitoring and Optimization:
Monitoring and optimizing the load placed on gear motors can contribute to their longevity. Operating gear motors within their specified load and speed ranges helps prevent excessive stress, overheating, and premature wear. Avoiding sudden and frequent acceleration or deceleration, as well as preventing overloading or continuous operation near the motor’s maximum capacity, can extend its lifespan.
5. Alignment and Vibration Analysis:
Proper alignment of gear motor components, such as gears, couplings, and shafts, is crucial for smooth and efficient operation. Misalignment can lead to increased friction, noise, and premature wear. Regularly checking and adjusting alignment, as well as performing vibration analysis, can help identify any misalignment or excessive vibration that may indicate underlying issues. Addressing alignment and vibration problems promptly can prevent further damage and maximize the motor’s longevity.
6. Preventive Maintenance and Regular Inspections:
Implementing a preventive maintenance program is essential for gear motors. This includes establishing a schedule for routine inspections, lubrication, and cleaning, as well as conducting periodic performance tests and measurements. Following the manufacturer’s guidelines and recommendations for maintenance tasks, such as belt tension checks, bearing replacements, or gear inspections, can help identify and address potential issues before they escalate into major failures.
By adhering to these maintenance requirements and best practices, the longevity of gear motors can be maximized. Regular maintenance, proper lubrication, load optimization, temperature control, and timely repairs or replacements of worn components contribute to the reliable operation and extended lifespan of gear motors.
What is the significance of gear reduction in gear motors, and how does it affect efficiency?
Gear reduction plays a significant role in gear motors as it enables the motor to deliver higher torque while reducing the output speed. This feature has several important implications for gear motors, including enhanced power transmission, improved control, and potential trade-offs in terms of efficiency. Here’s a detailed explanation of the significance of gear reduction in gear motors and its effect on efficiency:
Significance of Gear Reduction:
1. Increased Torque: Gear reduction allows gear motors to generate higher torque output compared to a motor without gears. By reducing the rotational speed at the output shaft, gear reduction increases the mechanical advantage of the system. This increased torque is beneficial in applications that require high torque to overcome resistance, such as lifting heavy loads or driving machinery with high inertia.
2. Improved Control: Gear reduction enhances the control and precision of gear motors. By reducing the speed, gear reduction allows for finer control over the motor’s rotational movement. This is particularly important in applications that require precise positioning or accurate speed control. The gear reduction mechanism enables gear motors to achieve smoother and more controlled movements, reducing the risk of overshooting or undershooting the desired position.
3. Load Matching: Gear reduction helps match the motor’s power characteristics to the load requirements. Different applications have varying torque and speed requirements. Gear reduction allows the gear motor to achieve a better match between the motor’s power output and the specific requirements of the load. It enables the motor to operate closer to its peak efficiency by optimizing the torque-speed trade-off.
Effect on Efficiency:
While gear reduction offers several advantages, it can also affect the efficiency of gear motors. Here’s how gear reduction impacts efficiency:
1. Mechanical Efficiency: The gear reduction process introduces mechanical components such as gears, bearings, and lubrication systems. These components introduce additional friction and mechanical losses into the system. As a result, some energy is lost in the form of heat during the gear reduction process. The efficiency of the gear motor is influenced by the quality of the gears, the lubrication used, and the overall design of the gear system. Well-designed and properly maintained gear systems can minimize these losses and optimize mechanical efficiency.
2. System Efficiency: Gear reduction affects the overall system efficiency by impacting the motor’s electrical efficiency. In gear motors, the motor typically operates at higher speeds and lower torques compared to a direct-drive motor. The overall system efficiency takes into account both the electrical efficiency of the motor and the mechanical efficiency of the gear system. While gear reduction can increase the torque output, it also introduces additional losses due to increased mechanical complexity. Therefore, the overall system efficiency may be lower compared to a direct-drive motor for certain applications.
It’s important to note that the efficiency of gear motors is influenced by various factors beyond gear reduction, such as motor design, control systems, and operating conditions. The selection of high-quality gears, proper lubrication, and regular maintenance can help minimize losses and improve efficiency. Additionally, advancements in gear technology, such as the use of precision gears and improved lubricants, can contribute to higher overall efficiency in gear motors.
In summary, gear reduction is significant in gear motors as it provides increased torque, improved control, and better load matching. However, gear reduction can introduce mechanical losses and affect the overall efficiency of the system. Proper design, maintenance, and consideration of application requirements are essential to optimize the balance between torque, speed, and efficiency in gear motors.
What are the different types of gears used in gear motors, and how do they impact performance?
Various types of gears are used in gear motors, each with its unique characteristics and impact on performance. The choice of gear type depends on the specific requirements of the application, including torque, speed, efficiency, noise level, and space constraints. Here’s a detailed explanation of the different types of gears used in gear motors and their impact on performance:
1. Spur Gears:
Spur gears are the most common type of gears used in gear motors. They have straight teeth that are parallel to the gear’s axis and mesh with another spur gear to transmit power. Spur gears provide high efficiency, reliable operation, and cost-effectiveness. However, they can generate significant noise due to the meshing of teeth, and they may produce axial thrust forces. Spur gears are suitable for applications that require high torque transmission and moderate to high rotational speeds.
2. Helical Gears:
Helical gears have angled teeth that are cut at an angle to the gear’s axis. This helical tooth configuration enables gradual engagement and smoother tooth contact, resulting in reduced noise and vibration compared to spur gears. Helical gears provide higher load-carrying capacity and are suitable for applications that require high torque transmission and moderate to high rotational speeds. They are commonly used in gear motors where low noise operation is desired, such as in automotive applications and industrial machinery.
3. Bevel Gears:
Bevel gears have teeth that are cut on a conical surface. They are used to transmit power between intersecting shafts, usually at right angles. Bevel gears can have straight teeth (straight bevel gears) or curved teeth (spiral bevel gears). These gears provide efficient power transmission and precise motion control in applications where shafts need to change direction. Bevel gears are commonly used in gear motors for applications such as steering systems, machine tools, and printing presses.
4. Worm Gears:
Worm gears consist of a worm (a type of screw) and a mating gear called a worm wheel or worm gear. The worm has a helical thread that meshes with the worm wheel, resulting in a compact and high gear reduction ratio. Worm gears provide high torque transmission, low noise operation, and self-locking properties, which prevent reverse motion. They are commonly used in gear motors for applications that require high gear reduction and locking capabilities, such as in lifting mechanisms, conveyor systems, and machine tools.
5. Planetary Gears:
Planetary gears, also known as epicyclic gears, consist of a central sun gear, multiple planet gears, and an outer ring gear. The planet gears mesh with both the sun gear and the ring gear, creating a compact and efficient gear system. Planetary gears offer high torque transmission, high gear reduction ratios, and excellent load distribution. They are commonly used in gear motors for applications that require high torque and compact size, such as in robotics, automotive transmissions, and industrial machinery.
6. Rack and Pinion:
Rack and pinion gears consist of a linear rack (a straight toothed bar) and a pinion gear (a spur gear with a small diameter). The pinion gear meshes with the rack to convert rotary motion into linear motion or vice versa. Rack and pinion gears provide precise linear motion control and are commonly used in gear motors for applications such as linear actuators, CNC machines, and steering systems.
The choice of gear type in a gear motor depends on factors such as the desired torque, speed, efficiency, noise level, and space constraints. Each type of gear offers specific advantages and impacts the performance of the gear motor differently. By selecting the appropriate gear type, gear motors can be optimized for their intended applications, ensuring efficient and reliable power transmission.
editor by CX 2024-04-02
China factory 24V 48V Motor Brushless Motor BLDC Motor Electrical Motor DC Motor Electric Motor Fan Motor Air Purifier Motor Micro Motor China Motor Brushed Motor AC Motor vacuum pump booster
Product Description
Product Description
BLDC Motor is featured with electronically commutation, extremely wide speed range and an outstandingly long life span, and mainly used in applications that low noise and low vibration is a prime requirement, such as consumer robot, coffee grinder, fan&air purifier, vacuum & blower ,etc.
In such cases, CJC’s outer rotor motors are for your products: You prefer motor carrys higher inertia and builds higher force. You are looking for high motor power with low energy consumption but with a compact size.
BL6130M24 is most suitable for stirring, vertical grinding and other low-speed vertical installation equipment with soft start, such as coffee makers, meat grinders, as well as creative new product, such as scooter board, massage gun, outboard wheels, strength loader for fitness.
Please consider the following requirements before requesting customization: motor size, controller, motor ratings, gearbox(if any), or other significant factors. The following parameters for your reference, we could customize motor for your applications.
Parameters:
| Rated Current | 1.2A | Rated Speed | 1200RPM | No-load Speed | 2000-4000RPM | Outer Diamter | φ61mm |
| Rated Power | 20-40W | Rated Voltage | DC12V/24V | Torque | 150m.NM | Length | 30mm |
Drawing:
Characteridtics Of BLDC Motor
Innovative Product Display
Product Usage
Company Profile
Certifications
Exhibition
FAQ
Q: Can I visit your factory before we place the order?
A: Yes. You are welcome to visit our factory.
Q: Do you accept customization?
A: Of course. We have a strong design team. Any problems will get our technical answer.
Q: How soon can I get the price?
A: Usually we quote within 24 hours after getting your inquiry (Except weekend and holidays). If you are very urgent to get the price, please
contact us by email or other way so that we can quote.
Q: What’s the delivery time of samples?
A: 1-3 weeks.
Q: What’s the delivery time of mass production?
A: Normally one month. It depends on your order quantity or other special situation.
Q: What’s your payment terms?
A: T/T, Paypal, Western Union, and other payment ways is available. Please contact us which payment ways you need before placing the order. Payment terms: 30%-50% deposit, the balance before shipment.
Q: What’s the shipping way?
A: We accept shipping way by Express (DHL, UPS, Fedex, etc), by Sea and other shipping way. Please contact us if you need other shipping
way before shipment.
/* January 22, 2571 19:08:37 */!function(){function s(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
| Application: | Universal, Industrial, Household Appliances, Power Tools |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Excited |
| Function: | Control, Driving |
| Casing Protection: | Closed Type |
| Number of Poles: | 2-6 |
| Samples: |
US$ 9.9/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
|
|
|---|

Are there specific maintenance requirements for AC motors to ensure optimal performance?
Yes, AC motors have specific maintenance requirements to ensure their optimal performance and longevity. Regular maintenance helps prevent unexpected failures, maximizes efficiency, and extends the lifespan of the motor. Here are some key maintenance practices for AC motors:
- Cleaning and Inspection: Regularly clean the motor to remove dust, dirt, and debris that can accumulate on the motor surfaces and hinder heat dissipation. Inspect the motor for any signs of damage, loose connections, or abnormal noise/vibration. Address any issues promptly to prevent further damage.
- Lubrication: Check the motor’s lubrication requirements and ensure proper lubrication of bearings, gears, and other moving parts. Insufficient or excessive lubrication can lead to increased friction, overheating, and premature wear. Follow the manufacturer’s guidelines for lubrication intervals and use the recommended lubricants.
- Belt and Pulley Maintenance: If the motor is coupled with a belt and pulley system, regularly inspect and adjust the tension of the belts. Improper belt tension can affect motor performance and efficiency. Replace worn-out belts and damaged pulleys as needed.
- Cooling System Maintenance: AC motors often have cooling systems such as fans or heat sinks to dissipate heat generated during operation. Ensure that these cooling systems are clean and functioning properly. Remove any obstructions that may impede airflow and compromise cooling efficiency.
- Electrical Connections: Regularly inspect the motor’s electrical connections for signs of loose or corroded terminals. Loose connections can lead to voltage drops, increased resistance, and overheating. Tighten or replace any damaged connections and ensure proper grounding.
- Vibration Analysis: Periodically perform vibration analysis on the motor to detect any abnormal vibrations. Excessive vibration can indicate misalignment, unbalanced rotors, or worn-out bearings. Address the underlying causes of vibration to prevent further damage and ensure smooth operation.
- Motor Testing: Conduct regular motor testing, such as insulation resistance testing and winding resistance measurement, to assess the motor’s electrical condition. These tests can identify insulation breakdown, winding faults, or other electrical issues that may affect motor performance and reliability.
- Professional Maintenance: For more complex maintenance tasks or when dealing with large industrial motors, it is advisable to involve professional technicians or motor specialists. They have the expertise and tools to perform in-depth inspections, repairs, and preventive maintenance procedures.
It’s important to note that specific maintenance requirements may vary depending on the motor type, size, and application. Always refer to the manufacturer’s guidelines and recommendations for the particular AC motor in use. By following proper maintenance practices, AC motors can operate optimally, minimize downtime, and have an extended service life.

How do AC motors contribute to the functioning of household appliances?
AC motors play a crucial role in the functioning of numerous household appliances by converting electrical energy into mechanical energy. These motors are used in a wide range of devices, powering various components and performing essential tasks. Let’s explore how AC motors contribute to the functioning of household appliances:
- Kitchen Appliances: AC motors are found in various kitchen appliances, such as refrigerators, freezers, dishwashers, and blenders. In refrigerators and freezers, AC motors drive the compressor, which circulates the refrigerant and maintains the desired temperature. Dishwashers use AC motors to power the water pumps, spray arms, and the motorized detergent dispenser. Blenders utilize AC motors to rotate the blades and blend ingredients.
- Laundry Appliances: AC motors are integral to laundry appliances like washing machines and clothes dryers. Washing machines rely on AC motors to power the agitator or the drum, facilitating the washing and spinning cycles. Clothes dryers use AC motors to rotate the drum and operate the blower fan, facilitating the drying process.
- Vacuum Cleaners: Vacuum cleaners utilize AC motors to generate suction and drive the motorized brush or beater bar. These motors power the fan or impeller, creating the necessary airflow for effective cleaning.
- Fans and Air Circulation: AC motors are employed in various types of fans, including ceiling fans, table fans, and pedestal fans. These motors drive the fan blades, producing airflow and facilitating air circulation to provide cooling or ventilation in rooms. Additionally, AC motors power exhaust fans used in kitchens, bathrooms, and range hoods to remove odors, smoke, or excess moisture.
- Air Conditioning and Heating Systems: AC motors are critical components in air conditioning and heating systems. They power the compressor, condenser fan, and blower fan, which are responsible for circulating refrigerant, dissipating heat, and delivering conditioned air throughout the house. AC motors enable the regulation of temperature and humidity levels, ensuring comfort in residential spaces.
- Garage Door Openers: AC motors are utilized in garage door openers to drive the mechanism responsible for opening and closing the garage door. These motors generate the necessary torque to lift or lower the door smoothly and efficiently.
- Other Appliances: AC motors are also found in a variety of other household appliances. For instance, they power pumps in water heaters, swimming pool filters, and sump pumps. AC motors are used in dehumidifiers, humidifiers, and air purifiers to drive the fans and other internal components. They are also present in audiovisual equipment, such as DVD players, record players, and fans used for cooling electronics.
In summary, AC motors are essential components in household appliances, enabling their proper functioning and delivering the mechanical energy required for various tasks. From kitchen appliances to laundry machines, fans, air conditioning systems, and more, AC motors provide the necessary power and functionality to enhance our daily lives.
What are the key advantages of using AC motors in industrial applications?
AC motors offer several key advantages that make them highly suitable for industrial applications. Here are some of the main advantages:
- Simple and Robust Design: AC motors, particularly induction motors, have a simple and robust design, making them reliable and easy to maintain. They consist of fewer moving parts compared to other types of motors, which reduces the likelihood of mechanical failure and the need for frequent maintenance.
- Wide Range of Power Ratings: AC motors are available in a wide range of power ratings, from small fractional horsepower motors to large industrial motors with several megawatts of power. This versatility allows for their application in various industrial processes and machinery, catering to different power requirements.
- High Efficiency: AC motors, especially modern designs, offer high levels of efficiency. They convert electrical energy into mechanical energy with minimal energy loss, resulting in cost savings and reduced environmental impact. High efficiency also means less heat generation, contributing to the longevity and reliability of the motor.
- Cost-Effectiveness: AC motors are generally cost-effective compared to other types of motors. Their simple construction and widespread use contribute to economies of scale, making them more affordable for industrial applications. Additionally, AC motors often have lower installation and maintenance costs due to their robust design and ease of operation.
- Flexible Speed Control: AC motors, particularly induction motors, offer various methods for speed control, allowing for precise adjustment of motor speed to meet specific industrial requirements. Speed control mechanisms such as variable frequency drives (VFDs) enable enhanced process control, energy savings, and improved productivity.
- Compatibility with AC Power Grid: AC motors are compatible with the standard AC power grid, which is widely available in industrial settings. This compatibility simplifies the motor installation process and eliminates the need for additional power conversion equipment, reducing complexity and cost.
- Adaptability to Various Environments: AC motors are designed to operate reliably in a wide range of environments. They can withstand variations in temperature, humidity, and dust levels commonly encountered in industrial settings. Additionally, AC motors can be equipped with protective enclosures to provide additional resistance to harsh conditions.
These advantages make AC motors a popular choice for industrial applications across various industries. Their simplicity, reliability, cost-effectiveness, energy efficiency, and speed control capabilities contribute to improved productivity, reduced operational costs, and enhanced process control in industrial settings.
editor by CX 2024-03-28
China Best Sales 57bl High Torque 12V 24V 36V 48V 60V Electrical Brushless DC Motor 30W 50W 75W 100W 200W 250W BLDC Geared Motor with Controller Brake Encoder Integrated with high quality
Product Description
Below are only some typical models.
For more information or a customed motor, Pls contact us.
Option for :
customized shaft, performance, voltage, mounting, lead wires..
Option for:
Electric Brake, Planetary Gearbox, Worm Gearbox, Optical Encoder Integrated
Size 57mm brushless dc motors
Rated Voltage : 24 Volt
Option for 12v 24v 36v 48v 60v
| Bearing | High quality ball bearing |
| Poles | 4-poles 8-poles |
| Protection class | IP40 IP54 option |
| Insulation class | class: F |
Standard Version
High Torque Version
57mm Brushless DC Motor with Planetary Gear Box
ABOVE MODELS ARE ONLY TYPICAL MODELS
WE MAKE CUSTOMED VOLTAGE, WINDING, SHAFT, MOUNTING,
AND MOTOR ADDERS FOR ENCODER, GEARBOX, BRAKE…ETC
CONTROLLER INTEGRATED
PLANET VERSION, CONTROLLER BRAKE ENCODER INTEGRATED
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Shunt |
| Function: | Control, Driving |
| Casing Protection: | Closed Type |
| Number of Poles: | 8 |
| Customization: |
Available
|
|
|---|
Can gear motors be used in robotics, and if so, what are some notable applications?
Yes, gear motors are widely used in robotics due to their ability to provide torque, precise control, and compact size. They play a crucial role in various robotic applications, enabling the movement, manipulation, and control of robotic systems. Here are some notable applications of gear motors in robotics:
1. Robotic Arm Manipulation:
Gear motors are commonly used in robotic arms to provide precise and controlled movement. They enable the articulation of the arm’s joints, allowing the robot to reach different positions and orientations. Gear motors with high torque capabilities are essential for lifting, rotating, and manipulating objects with varying weights and sizes.
2. Mobile Robots:
Gear motors are employed in mobile robots, including wheeled robots and legged robots, to drive their locomotion. They provide the necessary torque and control for the robot to move, turn, and navigate in different environments. Gear motors with appropriate gear ratios ensure the robot’s mobility, stability, and maneuverability.
3. Robotic Grippers and End Effectors:
Gear motors are used in robotic grippers and end effectors to control the opening, closing, and gripping force. By integrating gear motors into the gripper mechanism, robots can grasp and manipulate objects of various shapes, sizes, and weights. The gear motors enable precise control over the gripping action, allowing the robot to handle delicate or fragile objects with care.
4. Autonomous Drones and UAVs:
Gear motors are utilized in the propulsion systems of autonomous drones and unmanned aerial vehicles (UAVs). They drive the propellers or rotors, providing the necessary thrust and control for the drone’s flight. Gear motors with high power-to-weight ratios, efficient energy conversion, and precise speed control are crucial for achieving stable and maneuverable flight in drones.
5. Humanoid Robots:
Gear motors are integral to the movement and functionality of humanoid robots. They are used in robotic joints, such as hips, knees, and shoulders, to enable human-like movements. Gear motors with appropriate torque and speed capabilities allow humanoid robots to walk, run, climb stairs, and perform complex motions resembling human actions.
6. Robotic Exoskeletons:
Gear motors play a vital role in robotic exoskeletons, which are wearable robotic devices designed to augment human strength and assist in physical tasks. Gear motors are used in the exoskeleton’s joints and actuators, providing the necessary torque and control to enhance human abilities. They enable users to perform tasks with reduced effort, assist in rehabilitation, or provide support in physically demanding environments.
These are just a few notable applications of gear motors in robotics. Their versatility, torque capabilities, precise control, and compact size make them indispensable components in various robotic systems. Gear motors enable robots to perform complex tasks, move with agility, interact with the environment, and assist humans in a wide range of applications, from industrial automation to healthcare and exploration.
What is the significance of gear reduction in gear motors, and how does it affect efficiency?
Gear reduction plays a significant role in gear motors as it enables the motor to deliver higher torque while reducing the output speed. This feature has several important implications for gear motors, including enhanced power transmission, improved control, and potential trade-offs in terms of efficiency. Here’s a detailed explanation of the significance of gear reduction in gear motors and its effect on efficiency:
Significance of Gear Reduction:
1. Increased Torque: Gear reduction allows gear motors to generate higher torque output compared to a motor without gears. By reducing the rotational speed at the output shaft, gear reduction increases the mechanical advantage of the system. This increased torque is beneficial in applications that require high torque to overcome resistance, such as lifting heavy loads or driving machinery with high inertia.
2. Improved Control: Gear reduction enhances the control and precision of gear motors. By reducing the speed, gear reduction allows for finer control over the motor’s rotational movement. This is particularly important in applications that require precise positioning or accurate speed control. The gear reduction mechanism enables gear motors to achieve smoother and more controlled movements, reducing the risk of overshooting or undershooting the desired position.
3. Load Matching: Gear reduction helps match the motor’s power characteristics to the load requirements. Different applications have varying torque and speed requirements. Gear reduction allows the gear motor to achieve a better match between the motor’s power output and the specific requirements of the load. It enables the motor to operate closer to its peak efficiency by optimizing the torque-speed trade-off.
Effect on Efficiency:
While gear reduction offers several advantages, it can also affect the efficiency of gear motors. Here’s how gear reduction impacts efficiency:
1. Mechanical Efficiency: The gear reduction process introduces mechanical components such as gears, bearings, and lubrication systems. These components introduce additional friction and mechanical losses into the system. As a result, some energy is lost in the form of heat during the gear reduction process. The efficiency of the gear motor is influenced by the quality of the gears, the lubrication used, and the overall design of the gear system. Well-designed and properly maintained gear systems can minimize these losses and optimize mechanical efficiency.
2. System Efficiency: Gear reduction affects the overall system efficiency by impacting the motor’s electrical efficiency. In gear motors, the motor typically operates at higher speeds and lower torques compared to a direct-drive motor. The overall system efficiency takes into account both the electrical efficiency of the motor and the mechanical efficiency of the gear system. While gear reduction can increase the torque output, it also introduces additional losses due to increased mechanical complexity. Therefore, the overall system efficiency may be lower compared to a direct-drive motor for certain applications.
It’s important to note that the efficiency of gear motors is influenced by various factors beyond gear reduction, such as motor design, control systems, and operating conditions. The selection of high-quality gears, proper lubrication, and regular maintenance can help minimize losses and improve efficiency. Additionally, advancements in gear technology, such as the use of precision gears and improved lubricants, can contribute to higher overall efficiency in gear motors.
In summary, gear reduction is significant in gear motors as it provides increased torque, improved control, and better load matching. However, gear reduction can introduce mechanical losses and affect the overall efficiency of the system. Proper design, maintenance, and consideration of application requirements are essential to optimize the balance between torque, speed, and efficiency in gear motors.
How does the gearing mechanism in a gear motor contribute to torque and speed control?
The gearing mechanism in a gear motor plays a crucial role in controlling torque and speed. By utilizing different gear ratios and configurations, the gearing mechanism allows for precise manipulation of these parameters. Here’s a detailed explanation of how the gearing mechanism contributes to torque and speed control in a gear motor:
The gearing mechanism consists of multiple gears with varying sizes, tooth configurations, and arrangements. Each gear in the system engages with another gear, creating a mechanical connection. When the motor rotates, it drives the rotation of the first gear, which then transfers the motion to subsequent gears, ultimately resulting in the output shaft’s rotation.
Torque Control:
The gearing mechanism in a gear motor enables torque control through the principle of mechanical advantage. The gear system utilizes gears with different numbers of teeth, known as gear ratio, to adjust the torque output. When a smaller gear (pinion) engages with a larger gear (gear), the pinion rotates faster than the gear but exerts more force or torque. This results in torque amplification, allowing the gear motor to deliver higher torque at the output shaft while reducing the rotational speed. Conversely, if a larger gear engages with a smaller gear, torque reduction occurs, resulting in higher rotational speed at the output shaft.
By selecting the appropriate gear ratio, the gearing mechanism effectively adjusts the torque output of the gear motor to match the requirements of the application. This torque control capability is essential in applications that demand high torque for heavy lifting or overcoming resistance, as well as applications that require lower torque but higher rotational speed.
Speed Control:
The gearing mechanism also contributes to speed control in a gear motor. The gear ratio determines the relationship between the rotational speed of the input shaft (driven by the motor) and the output shaft. When a gear motor has a higher gear ratio (more teeth on the driven gear compared to the driving gear), it reduces the output speed while increasing the torque. Conversely, a lower gear ratio increases the output speed while reducing the torque.
By choosing the appropriate gear ratio, the gearing mechanism allows for precise speed control in a gear motor. This is particularly useful in applications that require specific speed ranges or variations, such as conveyor systems, robotic movements, or machinery that needs to operate at different speeds for different tasks. The speed control capability of the gearing mechanism enables the gear motor to match the desired speed requirements of the application accurately.
In summary, the gearing mechanism in a gear motor contributes to torque and speed control by utilizing different gear ratios and configurations. It enables torque amplification or reduction, depending on the gear arrangement, allowing the gear motor to deliver the required torque output. Additionally, the gear ratio also determines the relationship between the rotational speed of the input and output shafts, providing precise speed control. These torque and speed control capabilities make gear motors versatile and suitable for a wide range of applications in various industries.
editor by CX 2023-10-20
China supplier 36mm High Torque 5n. M 10n. M 24V Brushed Brushless BLDC Planetary Gearbox Gear Motor for Robot motor electric
Product Description
SHN Motors
1.Features
1) Step Angle Accuracy: ±5%
2) Resistance Accuracy: ±10%
3) Inductance Accuracy: ±20%
4) Temperature Rise: 80°C Max
5) Ambient Temperature: -20°C~+50°C
6) Insulation Resistance: 100MΩ Min., 500VDC
7) Dielectric Strength: 500VAC for 1 minute
8) Shaft Radial Play: 0.02Max (450g-load)
9) Shaft Axial Play: 0.08Max (450g-load)
2.Related Specifications
1) 42mm series
| Model | DMW421 | DMW422 | DMW423 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 5000 | 5000 | 5000 |
| Rated torque | Nm | 0.063 | 0.094 | 0.125 |
| Rated Speed | rpm | 4000 | 4000 | 4000 |
| Rated Current | A | 1.7 | 2.5 | 3.5 |
| Torque(max) | Nm | 0.19 | 0.27 | 0.38 |
| Back-EMF constant | V/Krpm | 3.13 | 3.13 | 3.15 |
| Torque Constant | Nm/A | 0.039 | 0.04 | 0.04 |
| Resistance | ohm | 1.5 | 0.53 | 0.74 |
| Weight | Kg | 0.3 | 0.4 | 0.5 |
| Length | mm | 41 | 51 | 6 |
2) 70mmSeries
| Model | Rated Voltage | No load speed |
Rated torque | Rated Speed | Rated Current |
Rated power |
L |
| VDC | RPM | Nm | rpm | A | W | mm | |
| DMW701 | 48 | 3500 | 0.5 | 3000 | 4.3 | 157 | 86 |
| DMW702 | 48 | 3500 | 1 | 3000 | 8.7 | 314 | 116 |
| DMW703 | 48 | 3500 | 1.5 | 3000 | 12.9 | 471 | 136 |
3) 80mmSeries
| Model | DMW801 | DMW802 | DMW803 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 4200 | 4200 | 4200 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 5.2 | 10.5 | 15 |
| Rated power | W | 79 | 157 | 236 |
| Back-EMF constant | V/Krpm | 9 | 9.2 | 9.5 |
| Torque Constant | Nm/A | 0.06 | 0.052 | 0.05 |
| Resistance | ohm | 0.5 | 0.43 | 0.35 |
| Weight | Kg | 1.6 | 2.2 | 3 |
| Length | mm | 75 | 95 | 115 |
4) 86mmSeries
| Model | DMW861 | DMW862 | DMW863 | |
| Voltage | V | 48 | ||
| No load speed | rpm | 3500 | 3500 | 3400 |
| Rated torque | Nm | 1.0 | 1.8 | 2.5 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 8.6 | 14.8 | 20 |
| Torque(max) | Nm | 3.0 | 5.4 | 7.5 |
| Back-EMF constant | V/Krpm | 9.8 | 9.8 | 10 |
| Torque Constant | Nm/A | 0.13 | 0.13 | 0.14 |
| Resistance | ohm | 0.32 | 0.15 | 0.1 |
| Weight | Kg | 2.2 | 3.2 | 4.2 |
| Length | mm | 80 | 105 | 130 |
5) 60mmSeries
| Model | DMW601 | DMW602 | DMW603 | |
| Voltage | V | 36 | ||
| No load speed | rpm | 4100 | 4100 | 4100 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 3 | 6 | 9 |
| Torque(max) | Nm | 0.75 | 1.5 | 2 |
| Back-EMF constant | V/Krpm | 6.2 | 6.5 | 6.5 |
| Torque Constant | Nm/A | 0.043 | 0.045 | 0.041 |
| Resistance | ohm | 0.59 | 0.26 | 0.2 |
| Weight | Kg | 0.9 | 1.2 | 1.6 |
| Length | mm | 78 | 99 | 120 |
6) 57mm Series
| Model | DMW571 | DMW572 | DMW573 | DMW574 | ||
| Voltage | V | 36 | ||||
| No load speed | rpm | 5200 | 5200 | 5300 | 5400 | |
| Rated torque | Nm | 0.11 | 0.22 | 0.32 | 0.42 | |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 | |
| Rated Current | A | 1.8 | 3.2 | 4.7 | 6.5 | |
| Torque(max) | Nm | 0.3 | 0.5 | 0.8 | 1.2 | |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 | |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 | |
| Resistance | ohm | 1.7 | 0.75 | 0.5 | 0.39 | |
| Weight | Kg | 0.45 | 0.8 | 1.1 | 1.4 | |
| Length | mm | 55 | 75 | 95 | 115 | |
7) 57 High Torque
| Model | DMW571 | DMW572 | DMW573 | DMW574 | |
| Voltage | V | 36 | |||
| No load speed | rpm | 5200 | 5200 | 5200 | 5200 |
| Rated torque | Nm | 0.14 | 0.28 | 0.43 | 0.49 |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 |
| Rated Current | A | 2.2 | 4.5 | 6.8 | 7.9 |
| Torque(max) | Nm | 0.4 | 0.6 | 0.9 | 1.5 |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 |
| Resistance | ohm | 2 | 0.9 | 0.7 | 0.5 |
| Weight | Kg | 0.5 | 0.9 | 1.3 | 1.8 |
| Length | mm | 55 | 75 | 95 | 115 |
3.Outlines/Drawings
4.About US
5.Main Products
6.Package and Shipping
1.FedEX / DHL / UPS / TNT for samples,Door to door service;
2.By sea for batch goods;
3.Customs specifying freight forwarders or negotiable shipping methods;
4.Delivery Time:20-25 Days for samples;30-35 Days for batch goods;
5.Payment Terms:T/T,L/C at sight,D/P etc.
7.FAQ
Q1. When can I get the quotation?
We usually quote within 24 hours after we get your inquiry.
If you are urgent to get the price, please send the message on and or call us directly.
Q2. How can I get a sample to check your quality?
After price confirmed, you can requiry for samples to check quality.
If you need the samples, we will charge for the sample cost.
But the sample cost can be refundable when your quantity of first order is above the MOQ
Q3. Can you do OEM for us?
Yes, the product packing can be designed as you want.
Q4. How about MOQ?
1 pcs for carton box.
Q5. What is your main market?
Eastern Europe, Southeast Asia, South America.
Please feel free to contact us if you have any question.
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Excited |
| Function: | Control, Driving |
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
| Samples: |
US$ 100/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
| Customized Request |
|---|

Dynamic Modeling of a Planetary Motor
A planetary gear motor consists of a series of gears rotating in perfect synchrony, allowing them to deliver torque in a higher output capacity than a spur gear motor. Unlike the planetary motor, spur gear motors are simpler to build and cost less, but they are better for applications requiring lower torque output. That is because each gear carries the entire load. The following are some key differences between the two types of gearmotors.
planetary gear system
A planetary gear transmission is a type of gear mechanism that transfers torque from one source to another, usually a rotary motion. Moreover, this type of gear transmission requires dynamic modeling to investigate its durability and reliability. Previous studies included both uncoupled and coupled meshing models for the analysis of planetary gear transmission. The combined model considers both the shaft structural stiffness and the bearing support stiffness. In some applications, the flexible planetary gear may affect the dynamic response of the system.
In a planetary gear device, the axial end surface of the cylindrical portion is rotatable relative to the separating plate. This mechanism retains lubricant. It is also capable of preventing foreign particles from entering the planetary gear system. A planetary gear device is a great choice if your planetary motor’s speed is high. A high-quality planetary gear system can provide a superior performance than conventional systems.
A planetary gear system is a complex mechanism, involving three moving links that are connected to each other through joints. The sun gear acts as an input and the planet gears act as outputs. They rotate about their axes at a ratio determined by the number of teeth on each gear. The sun gear has 24 teeth, while the planet gears have three-quarters that ratio. This ratio makes a planetary motor extremely efficient.
planetary gear train
To predict the free vibration response of a planetary motor gear train, it is essential to develop a mathematical model for the system. Previously, static and dynamic models were used to study the behavior of planetary motor gear trains. In this study, a dynamic model was developed to investigate the effects of key design parameters on the vibratory response. Key parameters for planetary gear transmissions include the structure stiffness and mesh stiffness, and the mass and location of the shaft and bearing supports.
The design of the planetary motor gear train consists of several stages that can run with variable input speeds. The design of the gear train enables the transmission of high torques by dividing the load across multiple planetary gears. In addition, the planetary gear train has multiple teeth which mesh simultaneously in operation. This design also allows for higher efficiency and transmittable torque. Here are some other advantages of planetary motor gear trains. All these advantages make planetary motor gear trains one of the most popular types of planetary motors.
The compact footprint of planetary gears allows for excellent heat dissipation. High speeds and sustained performances will require lubrication. This lubricant can also reduce noise and vibration. But if these characteristics are not desirable for your application, you can choose a different gear type. Alternatively, if you want to maintain high performance, a planetary motor gear train will be the best choice. So, what are the advantages of planetary motor gears?
planetary gear train with fixed carrier train ratio
The planetary gear train is a common type of transmission in various machines. Its main advantages are high efficiency, compactness, large transmission ratio, and power-to-weight ratio. This type of gear train is a combination of spur gears, single-helical gears, and herringbone gears. Herringbone planetary gears have lower axial force and high load carrying capacity. Herringbone planetary gears are commonly used in heavy machinery and transmissions of large vehicles.
To use a planetary gear train with a fixed carrier train ratio, the first and second planets must be in a carrier position. The first planet is rotated so that its teeth mesh with the sun’s. The second planet, however, cannot rotate. It must be in a carrier position so that it can mesh with the sun. This requires a high degree of precision, so the planetary gear train is usually made of multiple sets. A little analysis will simplify this design.
The planetary gear train is made up of three components. The outer ring gear is supported by a ring gear. Each gear is positioned at a specific angle relative to one another. This allows the gears to rotate at a fixed rate while transferring the motion. This design is also popular in bicycles and other small vehicles. If the planetary gear train has several stages, multiple ring gears may be shared. A stationary ring gear is also used in pencil sharpener mechanisms. Planet gears are extended into cylindrical cutters. The ring gear is stationary and the planet gears rotate around a sun axis. In the case of this design, the outer ring gear will have a -3/2 planet gear ratio.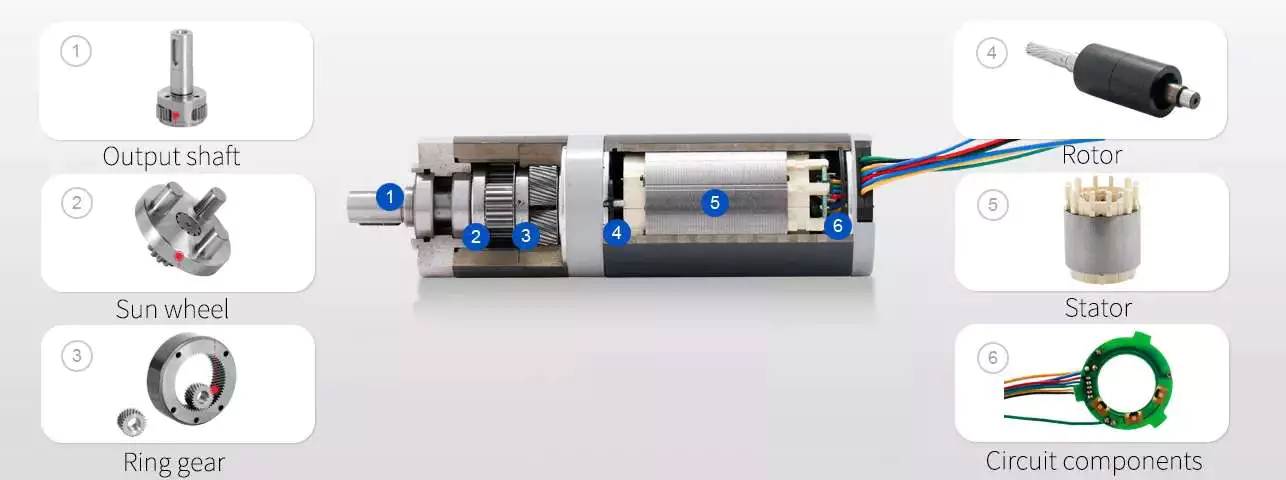
planetary gear train with zero helix angle
The torque distribution in a planetary gear is skewed, and this will drastically reduce the load carrying capacity of a needle bearing, and therefore the life of the bearing. To better understand how this can affect a gear train, we will examine two studies conducted on the load distribution of a planetary gear with a zero helix angle. The first study was done with a highly specialized program from the bearing manufacturer INA/FAG. The red line represents the load distribution along a needle roller in a zero helix gear, while the green line corresponds to the same distribution of loads in a 15 degree helix angle gear.
Another method for determining a gear’s helix angle is to consider the ratio of the sun and planet gears. While the sun gear is normally on the input side, the planet gears are on the output side. The sun gear is stationary. The two gears are in engagement with a ring gear that rotates 45 degrees clockwise. Both gears are attached to pins that support the planet gears. In the figure below, you can see the tangential and axial gear mesh forces on a planetary gear train.
Another method used for calculating power loss in a planetary gear train is the use of an auto transmission. This type of gear provides balanced performance in both power efficiency and load capacity. Despite the complexities, this method provides a more accurate analysis of how the helix angle affects power loss in a planetary gear train. If you’re interested in reducing the power loss of a planetary gear train, read on!
planetary gear train with spur gears
A planetary gearset is a type of mechanical drive system that uses spur gears that move in opposite directions within a plane. Spur gears are one of the more basic types of gears, as they don’t require any specialty cuts or angles to work. Instead, spur gears use a complex tooth shape to determine where the teeth will make contact. This in turn, will determine the amount of power, torque, and speed they can produce.
A two-stage planetary gear train with spur gears is also possible to run at variable input speeds. For such a setup, a mathematical model of the gear train is developed. Simulation of the dynamic behaviour highlights the non-stationary effects, and the results are in good agreement with the experimental data. As the ratio of spur gears to spur gears is not constant, it is called a dedendum.
A planetary gear train with spur gears is a type of epicyclic gear train. In this case, spur gears run between gears that contain both internal and external teeth. The circumferential motion of the spur gears is analogous to the rotation of planets in the solar system. There are four main components of a planetary gear train. The planet gear is positioned inside the sun gear and rotates to transfer motion to the sun gear. The planet gears are mounted on a joint carrier that is connected to the output shaft.
planetary gear train with helical gears
A planetary gear train with helical teeth is an extremely powerful transmission system that can provide high levels of power density. Helical gears are used to increase efficiency by providing a more efficient alternative to conventional worm gears. This type of transmission has the potential to improve the overall performance of a system, and its benefits extend far beyond the power density. But what makes this transmission system so appealing? What are the key factors to consider when designing this type of transmission system?
The most basic planetary train consists of the sun gear, planet gear, and ring gear elements. The number of planets varies, but the basic structure of planetary gears is similar. A simple planetary geartrain has the sun gear driving a carrier assembly. The number of planets can be as low as two or as high as six. A planetary gear train has a low mass inertia and is compact and reliable.
The mesh phase properties of a planetary gear train are particularly important in designing the profiles. Various parameters such as mesh phase difference and tooth profile modifications must be studied in depth in order to fully understand the dynamic characteristics of a PGT. These factors, together with others, determine the helical gears’ performance. It is therefore essential to understand the mesh phase of a planetary gear train to design it effectively.
editor by CX 2023-05-23
China Best Sales 36mm High Torque 5n. M 10n. M 24V Brushed Brushless BLDC Planetary Gearbox Gear Motor for Robot motor efficiency
Product Description
SHN Motors
1.Features
1) Step Angle Accuracy: ±5%
2) Resistance Accuracy: ±10%
3) Inductance Accuracy: ±20%
4) Temperature Rise: 80°C Max
5) Ambient Temperature: -20°C~+50°C
6) Insulation Resistance: 100MΩ Min., 500VDC
7) Dielectric Strength: 500VAC for 1 minute
8) Shaft Radial Play: 0.02Max (450g-load)
9) Shaft Axial Play: 0.08Max (450g-load)
2.Related Specifications
1) 42mm series
| Model | DMW421 | DMW422 | DMW423 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 5000 | 5000 | 5000 |
| Rated torque | Nm | 0.063 | 0.094 | 0.125 |
| Rated Speed | rpm | 4000 | 4000 | 4000 |
| Rated Current | A | 1.7 | 2.5 | 3.5 |
| Torque(max) | Nm | 0.19 | 0.27 | 0.38 |
| Back-EMF constant | V/Krpm | 3.13 | 3.13 | 3.15 |
| Torque Constant | Nm/A | 0.039 | 0.04 | 0.04 |
| Resistance | ohm | 1.5 | 0.53 | 0.74 |
| Weight | Kg | 0.3 | 0.4 | 0.5 |
| Length | mm | 41 | 51 | 6 |
2) 70mmSeries
| Model | Rated Voltage | No load speed |
Rated torque | Rated Speed | Rated Current |
Rated power |
L |
| VDC | RPM | Nm | rpm | A | W | mm | |
| DMW701 | 48 | 3500 | 0.5 | 3000 | 4.3 | 157 | 86 |
| DMW702 | 48 | 3500 | 1 | 3000 | 8.7 | 314 | 116 |
| DMW703 | 48 | 3500 | 1.5 | 3000 | 12.9 | 471 | 136 |
3) 80mmSeries
| Model | DMW801 | DMW802 | DMW803 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 4200 | 4200 | 4200 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 5.2 | 10.5 | 15 |
| Rated power | W | 79 | 157 | 236 |
| Back-EMF constant | V/Krpm | 9 | 9.2 | 9.5 |
| Torque Constant | Nm/A | 0.06 | 0.052 | 0.05 |
| Resistance | ohm | 0.5 | 0.43 | 0.35 |
| Weight | Kg | 1.6 | 2.2 | 3 |
| Length | mm | 75 | 95 | 115 |
4) 86mmSeries
| Model | DMW861 | DMW862 | DMW863 | |
| Voltage | V | 48 | ||
| No load speed | rpm | 3500 | 3500 | 3400 |
| Rated torque | Nm | 1.0 | 1.8 | 2.5 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 8.6 | 14.8 | 20 |
| Torque(max) | Nm | 3.0 | 5.4 | 7.5 |
| Back-EMF constant | V/Krpm | 9.8 | 9.8 | 10 |
| Torque Constant | Nm/A | 0.13 | 0.13 | 0.14 |
| Resistance | ohm | 0.32 | 0.15 | 0.1 |
| Weight | Kg | 2.2 | 3.2 | 4.2 |
| Length | mm | 80 | 105 | 130 |
5) 60mmSeries
| Model | DMW601 | DMW602 | DMW603 | |
| Voltage | V | 36 | ||
| No load speed | rpm | 4100 | 4100 | 4100 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 3 | 6 | 9 |
| Torque(max) | Nm | 0.75 | 1.5 | 2 |
| Back-EMF constant | V/Krpm | 6.2 | 6.5 | 6.5 |
| Torque Constant | Nm/A | 0.043 | 0.045 | 0.041 |
| Resistance | ohm | 0.59 | 0.26 | 0.2 |
| Weight | Kg | 0.9 | 1.2 | 1.6 |
| Length | mm | 78 | 99 | 120 |
6) 57mm Series
| Model | DMW571 | DMW572 | DMW573 | DMW574 | ||
| Voltage | V | 36 | ||||
| No load speed | rpm | 5200 | 5200 | 5300 | 5400 | |
| Rated torque | Nm | 0.11 | 0.22 | 0.32 | 0.42 | |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 | |
| Rated Current | A | 1.8 | 3.2 | 4.7 | 6.5 | |
| Torque(max) | Nm | 0.3 | 0.5 | 0.8 | 1.2 | |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 | |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 | |
| Resistance | ohm | 1.7 | 0.75 | 0.5 | 0.39 | |
| Weight | Kg | 0.45 | 0.8 | 1.1 | 1.4 | |
| Length | mm | 55 | 75 | 95 | 115 | |
7) 57 High Torque
| Model | DMW571 | DMW572 | DMW573 | DMW574 | |
| Voltage | V | 36 | |||
| No load speed | rpm | 5200 | 5200 | 5200 | 5200 |
| Rated torque | Nm | 0.14 | 0.28 | 0.43 | 0.49 |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 |
| Rated Current | A | 2.2 | 4.5 | 6.8 | 7.9 |
| Torque(max) | Nm | 0.4 | 0.6 | 0.9 | 1.5 |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 |
| Resistance | ohm | 2 | 0.9 | 0.7 | 0.5 |
| Weight | Kg | 0.5 | 0.9 | 1.3 | 1.8 |
| Length | mm | 55 | 75 | 95 | 115 |
3.Outlines/Drawings
4.About US
5.Main Products
6.Package and Shipping
1.FedEX / DHL / UPS / TNT for samples,Door to door service;
2.By sea for batch goods;
3.Customs specifying freight forwarders or negotiable shipping methods;
4.Delivery Time:20-25 Days for samples;30-35 Days for batch goods;
5.Payment Terms:T/T,L/C at sight,D/P etc.
7.FAQ
Q1. When can I get the quotation?
We usually quote within 24 hours after we get your inquiry.
If you are urgent to get the price, please send the message on and or call us directly.
Q2. How can I get a sample to check your quality?
After price confirmed, you can requiry for samples to check quality.
If you need the samples, we will charge for the sample cost.
But the sample cost can be refundable when your quantity of first order is above the MOQ
Q3. Can you do OEM for us?
Yes, the product packing can be designed as you want.
Q4. How about MOQ?
1 pcs for carton box.
Q5. What is your main market?
Eastern Europe, Southeast Asia, South America.
Please feel free to contact us if you have any question.
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Excited |
| Function: | Control, Driving |
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
| Samples: |
US$ 100/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
| Customized Request |
|---|
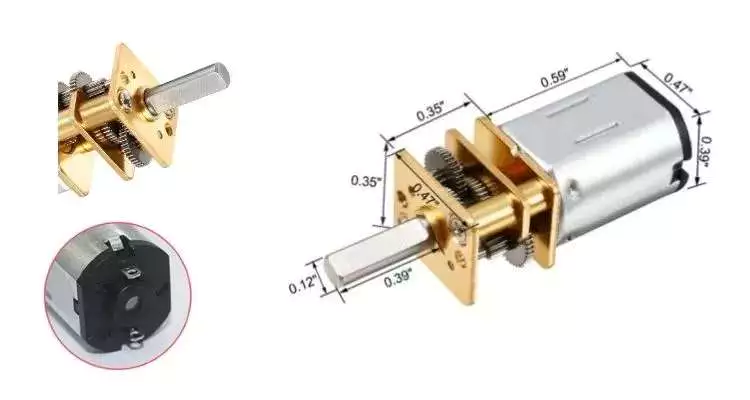
Benefits of a Planetary Motor
If you’re looking for an affordable way to power a machine, consider purchasing a Planetary Motor. These units are designed to provide a massive range of gear reductions, and are capable of generating much higher torques and torque density than other types of drive systems. This article will explain why you should consider purchasing one for your needs. And we’ll also discuss the differences between a planetary and spur gear system, as well as how you can benefit from them.
planetary gears
Planetary gears in a motor are used to reduce the speed of rotation of the armature 8. The reduction ratio is determined by the structure of the planetary gear device. The output shaft 5 rotates through the device with the assistance of the ring gear 4. The ring gear 4 engages with the pinion 3 once the shaft is rotated to the engagement position. The transmission of rotational torque from the ring gear to the armature causes the motor to start.
The axial end surface of a planetary gear device has two circular grooves 21. The depressed portion is used to retain lubricant. This lubricant prevents foreign particles from entering the planetary gear space. This feature enables the planetary gear device to be compact and lightweight. The cylindrical portion also minimizes the mass inertia. In this way, the planetary gear device can be a good choice for a motor with limited space.
Because of their compact footprint, planetary gears are great for reducing heat. In addition, this design allows them to be cooled. If you need high speeds and sustained performance, you may want to consider using lubricants. The lubricants present a cooling effect and reduce noise and vibration. If you want to maximize the efficiency of your motor, invest in a planetary gear hub drivetrain.
The planetary gear head has an internal sun gear that drives the multiple outer gears. These gears mesh together with the outer ring that is fixed to the motor housing. In industrial applications, planetary gears are used with an increasing number of teeth. This distribution of power ensures higher efficiency and transmittable torque. There are many advantages of using a planetary gear motor. These advantages include:
planetary gearboxes
A planetary gearbox is a type of drivetrain in which the input and output shafts are connected with a planetary structure. A planetary gearset can have three main components: an input gear, a planetary output gear, and a stationary position. Different gears can be used to change the transmission ratios. The planetary structure arrangement gives the planetary gearset high rigidity and minimizes backlash. This high rigidity is crucial for quick start-stop cycles and rotational direction.
Planetary gears need to be lubricated regularly to prevent wear and tear. In addition, transmissions must be serviced regularly, which can include fluid changes. The gears in a planetary gearbox will wear out with time, and any problems should be repaired immediately. However, if the gears are damaged, or if they are faulty, a planetary gearbox manufacturer will repair it for free.
A planetary gearbox is typically a 2-speed design, but professional manufacturers can provide triple and single-speed sets. Planetary gearboxes are also compatible with hydraulic, electromagnetic, and dynamic braking systems. The first step to designing a planetary gearbox is defining your application and the desired outcome. Famous constructors use a consultative modeling approach, starting each project by studying machine torque and operating conditions.
As the planetary gearbox is a compact design, space is limited. Therefore, bearings need to be selected carefully. The compact needle roller bearings are the most common option, but they cannot tolerate large axial forces. Those that can handle high axial forces, such as worm gears, should opt for tapered roller bearings. So, what are the advantages and disadvantages of a helical gearbox?
planetary gear motors
When we think of planetary gear motors, we tend to think of large and powerful machines, but in fact, there are many smaller, more inexpensive versions of the same machine. These motors are often made of plastic, and can be as small as six millimeters in diameter. Unlike their larger counterparts, they have only one gear in the transmission, and are made with a small diameter and small number of teeth.
They are similar to the solar system, with the planets rotating around a sun gear. The planet pinions mesh with the ring gear inside the sun gear. All of these gears are connected by a planetary carrier, which is the output shaft of the gearbox. The ring gear and planetary carrier assembly are attached to each other through a series of joints. When power is applied to any of these members, the entire assembly will rotate.
Compared to other configurations, planetary gearmotors are more complicated. Their construction consists of a sun gear centered in the center and several smaller gears that mesh with the central sun gear. These gears are enclosed in a larger internal tooth gear. This design allows them to handle larger loads than conventional gear motors, as the load is distributed among several gears. This type of motor is typically more expensive than other configurations, but can withstand the higher-load requirements of some machines.
Because they are cylindrical in shape, planetary gear motors are incredibly versatile. They can be used in various applications, including automatic transmissions. They are also used in applications where high-precision and speed are necessary. Furthermore, the planetary gear motor is robust and is characterized by low vibrations. The advantages of using a planetary gear motor are vast and include: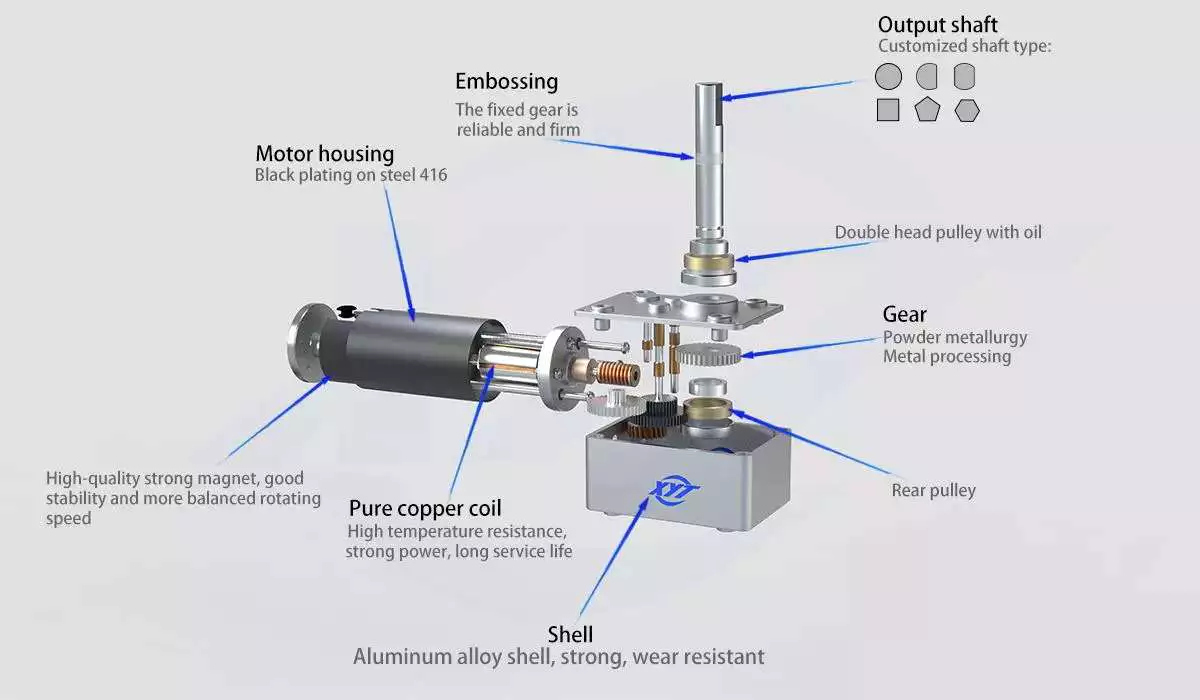
planetary gears vs spur gears
A planetary motor uses multiple teeth to share the load of rotating parts. This gives planetary gears high stiffness and low backlash – often as low as one or two arc minutes. These characteristics are important for applications that undergo frequent start-stop cycles or rotational direction changes. This article discusses the benefits of planetary gears and how they differ from spur gears. You can watch the animation below for a clearer understanding of how they operate and how they differ from spur gears.
Planetary gears move in a periodic manner, with a relatively small meshing frequency. As the meshing frequency increases, the amplitude of the frequency also increases. The amplitude of this frequency is small at low clearance values, and increases dramatically at higher clearance levels. The amplitude of the frequency is higher when the clearance reaches 0.2-0.6. The amplitude increases rapidly, whereas wear increases slowly after the initial 0.2-0.6-inch-wide clearance.
In high-speed, high-torque applications, a planetary motor is more effective. It has multiple contact points for greater torque and higher speed. If you are not sure which type to choose, you can consult with an expert and design a custom gear. If you are unsure of what type of motor you need, contact Twirl Motor and ask for help choosing the right one for your application.
A planetary gear arrangement offers a number of advantages over traditional fixed-axis gear system designs. The compact size allows for lower loss of effectiveness, and the more planets in the gear system enhances the torque density and capacity. Another benefit of a planetary gear system is that it is much stronger and more durable than its spur-gear counterpart. Combined with its many advantages, a planetary gear arrangement offers a superior solution to your shifting needs.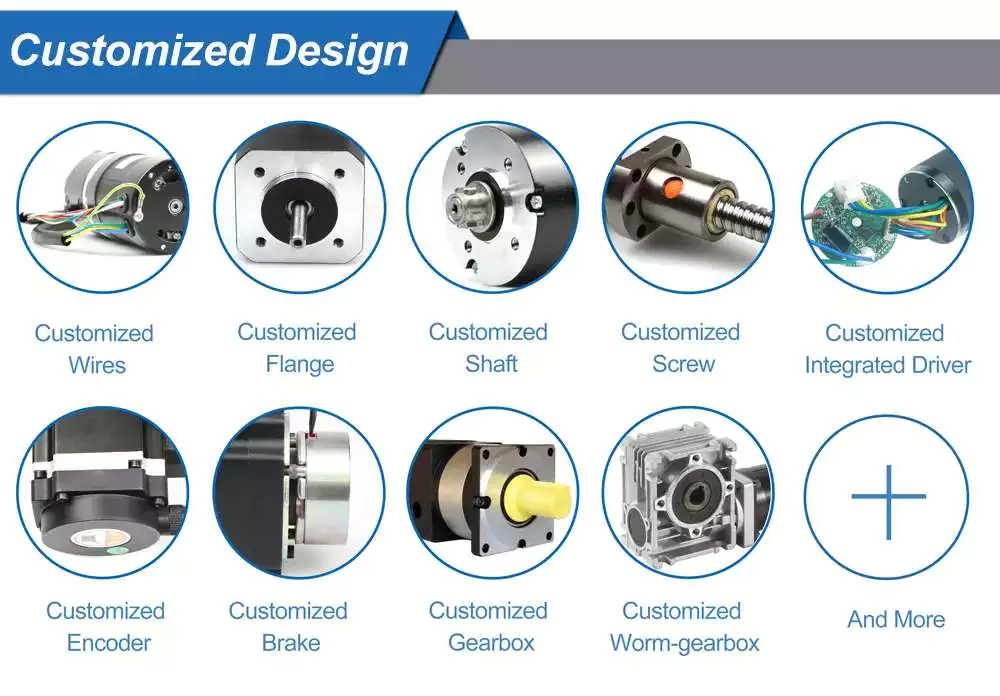
planetary gearboxes as a compact alternative to pinion-and-gear reducers
While traditional pinion-and-gear reducer design is bulky and complex, planetary gearboxes are compact and flexible. They are suitable for many applications, especially where space and weight are issues, as well as torque and speed reduction. However, understanding their mechanism and working isn’t as simple as it sounds, so here are some of the key benefits of planetary gearing.
Planetary gearboxes work by using two planetary gears that rotate around their own axes. The sun gear is used as the input, while the planetary gears are connected via a casing. The ratio of these gears is -Ns/Np, with 24 teeth in the sun gear and -3/2 on the planet gear.
Unlike traditional pinion-and-gear reducer designs, planetary gearboxes are much smaller and less expensive. A planetary gearbox is about 50% smaller and weighs less than a pinion-and-gear reducer. The smaller gear floats on top of three large gears, minimizing the effects of vibration and ensuring consistent transmission over time.
Planetary gearboxes are a good alternative to pinion-and-gear drive systems because they are smaller, less complex and offer a higher reduction ratio. Their meshing arrangement is similar to the Milky Way, with the sun gear in the middle and two or more outer gears. They are connected by a carrier that sets their spacing and incorporates an output shaft.
Compared to pinion-and-gear reduces, planetary gearboxes offer higher speed reduction and torque capacity. As a result, planetary gearboxes are small and compact and are often preferred for space-constrained applications. But what about the high torque transfer? If you’re looking for a compact alt
editor by CX 2023-05-22
China Standard 36mm High Torque 5n. M 10n. M 24V Brushed Brushless BLDC Planetary Gearbox Gear Motor for Robot motor armature
Product Description
SHN Motors
1.Features
1) Step Angle Accuracy: ±5%
2) Resistance Accuracy: ±10%
3) Inductance Accuracy: ±20%
4) Temperature Rise: 80°C Max
5) Ambient Temperature: -20°C~+50°C
6) Insulation Resistance: 100MΩ Min., 500VDC
7) Dielectric Strength: 500VAC for 1 minute
8) Shaft Radial Play: 0.02Max (450g-load)
9) Shaft Axial Play: 0.08Max (450g-load)
2.Related Specifications
1) 42mm series
| Model | DMW421 | DMW422 | DMW423 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 5000 | 5000 | 5000 |
| Rated torque | Nm | 0.063 | 0.094 | 0.125 |
| Rated Speed | rpm | 4000 | 4000 | 4000 |
| Rated Current | A | 1.7 | 2.5 | 3.5 |
| Torque(max) | Nm | 0.19 | 0.27 | 0.38 |
| Back-EMF constant | V/Krpm | 3.13 | 3.13 | 3.15 |
| Torque Constant | Nm/A | 0.039 | 0.04 | 0.04 |
| Resistance | ohm | 1.5 | 0.53 | 0.74 |
| Weight | Kg | 0.3 | 0.4 | 0.5 |
| Length | mm | 41 | 51 | 6 |
2) 70mmSeries
| Model | Rated Voltage | No load speed |
Rated torque | Rated Speed | Rated Current |
Rated power |
L |
| VDC | RPM | Nm | rpm | A | W | mm | |
| DMW701 | 48 | 3500 | 0.5 | 3000 | 4.3 | 157 | 86 |
| DMW702 | 48 | 3500 | 1 | 3000 | 8.7 | 314 | 116 |
| DMW703 | 48 | 3500 | 1.5 | 3000 | 12.9 | 471 | 136 |
3) 80mmSeries
| Model | DMW801 | DMW802 | DMW803 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 4200 | 4200 | 4200 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 5.2 | 10.5 | 15 |
| Rated power | W | 79 | 157 | 236 |
| Back-EMF constant | V/Krpm | 9 | 9.2 | 9.5 |
| Torque Constant | Nm/A | 0.06 | 0.052 | 0.05 |
| Resistance | ohm | 0.5 | 0.43 | 0.35 |
| Weight | Kg | 1.6 | 2.2 | 3 |
| Length | mm | 75 | 95 | 115 |
4) 86mmSeries
| Model | DMW861 | DMW862 | DMW863 | |
| Voltage | V | 48 | ||
| No load speed | rpm | 3500 | 3500 | 3400 |
| Rated torque | Nm | 1.0 | 1.8 | 2.5 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 8.6 | 14.8 | 20 |
| Torque(max) | Nm | 3.0 | 5.4 | 7.5 |
| Back-EMF constant | V/Krpm | 9.8 | 9.8 | 10 |
| Torque Constant | Nm/A | 0.13 | 0.13 | 0.14 |
| Resistance | ohm | 0.32 | 0.15 | 0.1 |
| Weight | Kg | 2.2 | 3.2 | 4.2 |
| Length | mm | 80 | 105 | 130 |
5) 60mmSeries
| Model | DMW601 | DMW602 | DMW603 | |
| Voltage | V | 36 | ||
| No load speed | rpm | 4100 | 4100 | 4100 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 3 | 6 | 9 |
| Torque(max) | Nm | 0.75 | 1.5 | 2 |
| Back-EMF constant | V/Krpm | 6.2 | 6.5 | 6.5 |
| Torque Constant | Nm/A | 0.043 | 0.045 | 0.041 |
| Resistance | ohm | 0.59 | 0.26 | 0.2 |
| Weight | Kg | 0.9 | 1.2 | 1.6 |
| Length | mm | 78 | 99 | 120 |
6) 57mm Series
| Model | DMW571 | DMW572 | DMW573 | DMW574 | ||
| Voltage | V | 36 | ||||
| No load speed | rpm | 5200 | 5200 | 5300 | 5400 | |
| Rated torque | Nm | 0.11 | 0.22 | 0.32 | 0.42 | |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 | |
| Rated Current | A | 1.8 | 3.2 | 4.7 | 6.5 | |
| Torque(max) | Nm | 0.3 | 0.5 | 0.8 | 1.2 | |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 | |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 | |
| Resistance | ohm | 1.7 | 0.75 | 0.5 | 0.39 | |
| Weight | Kg | 0.45 | 0.8 | 1.1 | 1.4 | |
| Length | mm | 55 | 75 | 95 | 115 | |
7) 57 High Torque
| Model | DMW571 | DMW572 | DMW573 | DMW574 | |
| Voltage | V | 36 | |||
| No load speed | rpm | 5200 | 5200 | 5200 | 5200 |
| Rated torque | Nm | 0.14 | 0.28 | 0.43 | 0.49 |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 |
| Rated Current | A | 2.2 | 4.5 | 6.8 | 7.9 |
| Torque(max) | Nm | 0.4 | 0.6 | 0.9 | 1.5 |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 |
| Resistance | ohm | 2 | 0.9 | 0.7 | 0.5 |
| Weight | Kg | 0.5 | 0.9 | 1.3 | 1.8 |
| Length | mm | 55 | 75 | 95 | 115 |
3.Outlines/Drawings
4.About US
5.Main Products
6.Package and Shipping
1.FedEX / DHL / UPS / TNT for samples,Door to door service;
2.By sea for batch goods;
3.Customs specifying freight forwarders or negotiable shipping methods;
4.Delivery Time:20-25 Days for samples;30-35 Days for batch goods;
5.Payment Terms:T/T,L/C at sight,D/P etc.
7.FAQ
Q1. When can I get the quotation?
We usually quote within 24 hours after we get your inquiry.
If you are urgent to get the price, please send the message on and or call us directly.
Q2. How can I get a sample to check your quality?
After price confirmed, you can requiry for samples to check quality.
If you need the samples, we will charge for the sample cost.
But the sample cost can be refundable when your quantity of first order is above the MOQ
Q3. Can you do OEM for us?
Yes, the product packing can be designed as you want.
Q4. How about MOQ?
1 pcs for carton box.
Q5. What is your main market?
Eastern Europe, Southeast Asia, South America.
Please feel free to contact us if you have any question.
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Excited |
| Function: | Control, Driving |
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
| Samples: |
US$ 100/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
| Customized Request |
|---|

The Benefits of Using a Gear Motor
A gear motor works on the principle of conservation of angular momentum. As the smaller gear covers more RPM and the larger gear produces more torque, the ratio between the two is greater than one. Similarly, a multiple gear motor follows the principle of energy conservation, with the direction of rotation always opposite to the one that is adjacent to it. It’s easy to understand the concept behind gear motors and the various types available. Read on to learn about the different types of gears and their applications.
Electric motor
The choice of an electric motor for gear motor is largely dependent on the application. There are various motor and gearhead combinations available, and some are more efficient than others. However, it is critical to understand the application requirements and select a motor that meets these needs. In this article, we’ll examine some of the benefits of using a gear motor. The pros and cons of each type are briefly discussed. You can buy new gear motors at competitive prices, but they aren’t the most reliable or durable option for your application.
To determine which motor is best for your application, you’ll need to consider the load and speed requirements. A gear motor’s efficiency (e) can be calculated by taking the input and output values and calculating their relation. On the graph below, the input (T) and output (P) values are represented as dashed lines. The input (I) value is represented as the torque applied to the motor shaft. The output (P) is the amount of mechanical energy converted. A DC gear motor is 70% efficient at 3.75 lb-in / 2,100 rpm.
In addition to the worm gear motor, you can also choose a compact DC worm gear motor with a variable gear ratio from 7.5 to 80. It has a range of options and can be custom-made for your specific application. The 3-phase AC gear motor, on the other hand, works at a rated power of one hp and torque of 1.143.2 kg-m. The output voltage is typically 220V.
Another important factor is the output shaft orientation. There are two main orientations for gearmotors: in-line and offset. In-line output shafts are most ideal for applications with high torque and short reduction ratios. If you want to avoid backlash, choose a right angle output shaft. An offset shaft can cause the output shaft to become excessively hot. If the output shaft is angled at a certain angle, it may be too large or too small.
Gear reducer
A gear reducer is a special kind of speed reducing motor, usually used in large machinery, such as compressors. These reducers have no cooling fan and are not designed to handle heavy loads. Different purposes require different service factors. For instance, a machine that requires frequent fast accelerations and occasional load spikes needs a gear reducer with a high service factor. A gear reducer that’s designed for long production shifts should be larger than a machine that uses it for short periods of time.
A gear reducer can reduce the speed of a motor by a factor of two. The reduction ratio changes the rotation speed of the receiving member. This change in speed is often required to solve problems of inertia mismatch. The torque density of a gear reducer is measured in newton meters and will depend on the motor used. The first criterion is the configuration of the input and output shafts. A gear ratio of 2:1, for example, means that the output speed has been cut in half.
Bevel gear reducers are a good option if the input and output shafts are perpendicular. This type is very robust and is perfect for situations where the angle between two axes is small. However, bevel gear reducers are expensive and require constant maintenance. They are usually used in heavy-duty conveyors and farm equipment. The correct choice of gear reducer for gear motor is crucial for the efficiency and reliability of the mechanism. To get the best gear reducer for your application, talk to a qualified manufacturer today.
Choosing a gear reducer for a gear motor can be tricky. The wrong one can ruin an entire machine, so it’s important to know the specifics. You must know the torque and speed requirements and choose a motor with the appropriate ratio. A gear reducer should also be compatible with the motor it’s intended for. In some cases, a smaller motor with a gear reducer will work better than a larger one.
Motor shaft
Proper alignment of the motor shaft can greatly improve the performance and life span of rotating devices. The proper alignment of motors and driven instruments enhances the transfer of energy from the motor to the instrument. Incorrect alignment leads to additional noise and vibration. It may also lead to premature failure of couplings and bearings. Misalignment also results in increased shaft and coupling temperatures. Hence, proper alignment is critical to improve the efficiency of the driven instrument.
When choosing the correct type of gear train for your motor, you need to consider its energy efficiency and the torque it can handle. A helical geared motor is more efficient for high output torque applications. Depending on the required speed and torque, you can choose between an in-line and a parallel helical geared motor. Both types of gears have their advantages and disadvantages. Spur gears are widespread. They are toothed and run parallel to the motor shaft.
A planetary gear motor can also have a linear output shaft. A stepping motor should not operate at too high current to prevent demagnetization, which will lead to step loss or torque drop. Ensure that the motor and gearbox output shafts are protected from external impacts. If the motor and gearbox are not protected against bumps, they may cause thread defects. Make sure that the motor shafts and rotors are protected from external impacts.
When choosing a metal for your gear motor’s motor shaft, you should consider the cost of hot-rolled bar stock. Its outer layers are more difficult to machine. This type of material contains residual stresses and other problems that make it difficult to machine. For these applications, you should choose a high-strength steel with hard outer layers. This type of steel is cheaper, but it also has size considerations. It’s best to test each material first to determine which one suits your needs.
In addition to reducing the speed of your device, a geared motor also minimizes the torque generated by your machine. It can be used with both AC and DC power. A high-quality gear motor is vital for stirring mechanisms and conveyor belts. However, you should choose a geared motor that uses high-grade gears and provides maximum efficiency. There are many types of planetary gear motors and gears on the market, and it’s important to choose the right one.
First stage gears
The first stage gears of a gear motor are the most important components of the entire device. The motor’s power transmission is 90% efficient, but there are many factors that can affect its performance. The gear ratios used should be high enough to handle the load, but not too high that they are limiting the motor’s speed. A gear motor should also have a healthy safety factor, and the lubricant must be sufficient to overcome any of these factors.
The transmission torque of the gear changes with its speed. The transmission torque at the input side of the gear decreases, transferring a small torque to the output side. The number of teeth and the pitch circle diameters can be used to calculate the torque. The first stage gears of gear motors can be categorized as spur gears, helical gears, or worm gears. These three types of gears have different torque capacities.
The first stage helical gear is the most important part of a gear motor. Its function is to transfer rotation from one gear to the other. Its output is the gearhead. The second stage gears are connected by a carrier. They work in tandem with the first stage gear to provide the output of the gearhead. Moreover, the first stage carrier rotates in the same direction as the input pinion.
Another important component is the output torque of the gearmotor. When choosing a gearmotor, consider the starting torque, running torque, output speed, overhung and shock loads, duty cycles, and more. It is crucial to choose a gearmotor with the right ratio for the application. By choosing the proper gearmotor, you will get maximum performance with minimal operating costs and increase plant productivity. For more information on first stage gears, check out our blog.
The first stage of a gear motor is composed of a set of fixed and rotating sprockets. The first stage of these gears acts as a drive gear. Its rotational mass is a limiting factor for torque. The second stage consists of a rotating shaft. This shaft rotates in the direction of the torque axis. It is also the limiting force for the motor’s torque.
editor by CX 2023-05-19
China factory 36mm High Torque 5n. M 10n. M 24V Brushed Brushless BLDC Planetary Gearbox Gear Motor for Robot motor armature
Product Description
SHN Motors
1.Features
1) Step Angle Accuracy: ±5%
2) Resistance Accuracy: ±10%
3) Inductance Accuracy: ±20%
4) Temperature Rise: 80°C Max
5) Ambient Temperature: -20°C~+50°C
6) Insulation Resistance: 100MΩ Min., 500VDC
7) Dielectric Strength: 500VAC for 1 minute
8) Shaft Radial Play: 0.02Max (450g-load)
9) Shaft Axial Play: 0.08Max (450g-load)
2.Related Specifications
1) 42mm series
| Model | DMW421 | DMW422 | DMW423 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 5000 | 5000 | 5000 |
| Rated torque | Nm | 0.063 | 0.094 | 0.125 |
| Rated Speed | rpm | 4000 | 4000 | 4000 |
| Rated Current | A | 1.7 | 2.5 | 3.5 |
| Torque(max) | Nm | 0.19 | 0.27 | 0.38 |
| Back-EMF constant | V/Krpm | 3.13 | 3.13 | 3.15 |
| Torque Constant | Nm/A | 0.039 | 0.04 | 0.04 |
| Resistance | ohm | 1.5 | 0.53 | 0.74 |
| Weight | Kg | 0.3 | 0.4 | 0.5 |
| Length | mm | 41 | 51 | 6 |
2) 70mmSeries
| Model | Rated Voltage | No load speed |
Rated torque | Rated Speed | Rated Current |
Rated power |
L |
| VDC | RPM | Nm | rpm | A | W | mm | |
| DMW701 | 48 | 3500 | 0.5 | 3000 | 4.3 | 157 | 86 |
| DMW702 | 48 | 3500 | 1 | 3000 | 8.7 | 314 | 116 |
| DMW703 | 48 | 3500 | 1.5 | 3000 | 12.9 | 471 | 136 |
3) 80mmSeries
| Model | DMW801 | DMW802 | DMW803 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 4200 | 4200 | 4200 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 5.2 | 10.5 | 15 |
| Rated power | W | 79 | 157 | 236 |
| Back-EMF constant | V/Krpm | 9 | 9.2 | 9.5 |
| Torque Constant | Nm/A | 0.06 | 0.052 | 0.05 |
| Resistance | ohm | 0.5 | 0.43 | 0.35 |
| Weight | Kg | 1.6 | 2.2 | 3 |
| Length | mm | 75 | 95 | 115 |
4) 86mmSeries
| Model | DMW861 | DMW862 | DMW863 | |
| Voltage | V | 48 | ||
| No load speed | rpm | 3500 | 3500 | 3400 |
| Rated torque | Nm | 1.0 | 1.8 | 2.5 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 8.6 | 14.8 | 20 |
| Torque(max) | Nm | 3.0 | 5.4 | 7.5 |
| Back-EMF constant | V/Krpm | 9.8 | 9.8 | 10 |
| Torque Constant | Nm/A | 0.13 | 0.13 | 0.14 |
| Resistance | ohm | 0.32 | 0.15 | 0.1 |
| Weight | Kg | 2.2 | 3.2 | 4.2 |
| Length | mm | 80 | 105 | 130 |
5) 60mmSeries
| Model | DMW601 | DMW602 | DMW603 | |
| Voltage | V | 36 | ||
| No load speed | rpm | 4100 | 4100 | 4100 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 3 | 6 | 9 |
| Torque(max) | Nm | 0.75 | 1.5 | 2 |
| Back-EMF constant | V/Krpm | 6.2 | 6.5 | 6.5 |
| Torque Constant | Nm/A | 0.043 | 0.045 | 0.041 |
| Resistance | ohm | 0.59 | 0.26 | 0.2 |
| Weight | Kg | 0.9 | 1.2 | 1.6 |
| Length | mm | 78 | 99 | 120 |
6) 57mm Series
| Model | DMW571 | DMW572 | DMW573 | DMW574 | ||
| Voltage | V | 36 | ||||
| No load speed | rpm | 5200 | 5200 | 5300 | 5400 | |
| Rated torque | Nm | 0.11 | 0.22 | 0.32 | 0.42 | |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 | |
| Rated Current | A | 1.8 | 3.2 | 4.7 | 6.5 | |
| Torque(max) | Nm | 0.3 | 0.5 | 0.8 | 1.2 | |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 | |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 | |
| Resistance | ohm | 1.7 | 0.75 | 0.5 | 0.39 | |
| Weight | Kg | 0.45 | 0.8 | 1.1 | 1.4 | |
| Length | mm | 55 | 75 | 95 | 115 | |
7) 57 High Torque
| Model | DMW571 | DMW572 | DMW573 | DMW574 | |
| Voltage | V | 36 | |||
| No load speed | rpm | 5200 | 5200 | 5200 | 5200 |
| Rated torque | Nm | 0.14 | 0.28 | 0.43 | 0.49 |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 |
| Rated Current | A | 2.2 | 4.5 | 6.8 | 7.9 |
| Torque(max) | Nm | 0.4 | 0.6 | 0.9 | 1.5 |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 |
| Resistance | ohm | 2 | 0.9 | 0.7 | 0.5 |
| Weight | Kg | 0.5 | 0.9 | 1.3 | 1.8 |
| Length | mm | 55 | 75 | 95 | 115 |
3.Outlines/Drawings
4.About US
5.Main Products
6.Package and Shipping
1.FedEX / DHL / UPS / TNT for samples,Door to door service;
2.By sea for batch goods;
3.Customs specifying freight forwarders or negotiable shipping methods;
4.Delivery Time:20-25 Days for samples;30-35 Days for batch goods;
5.Payment Terms:T/T,L/C at sight,D/P etc.
7.FAQ
Q1. When can I get the quotation?
We usually quote within 24 hours after we get your inquiry.
If you are urgent to get the price, please send the message on and or call us directly.
Q2. How can I get a sample to check your quality?
After price confirmed, you can requiry for samples to check quality.
If you need the samples, we will charge for the sample cost.
But the sample cost can be refundable when your quantity of first order is above the MOQ
Q3. Can you do OEM for us?
Yes, the product packing can be designed as you want.
Q4. How about MOQ?
1 pcs for carton box.
Q5. What is your main market?
Eastern Europe, Southeast Asia, South America.
Please feel free to contact us if you have any question.
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Excited |
| Function: | Control, Driving |
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
| Samples: |
US$ 100/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
| Customized Request |
|---|

How to Maximize Gear Motor Reliability
A gearmotor is a mechanical device used to transmit torque from one location to another. As its name implies, it is designed to rotate one object relative to another. Its main use is to transmit torque from one point to another. The most common types of gear motors are: worm, spur, and helical. Each of these has specific functions and can be used for a variety of applications. Reliability is also an important factor to consider when choosing a gearmotor.
Applications of a gear motor
Despite its small size, a gear motor has many applications. These include heavy machinery lifts, hospital beds, and power recliners. It is also found in many everyday products, such as electromechanical clocks and cake mixers. Its versatility allows it to produce a high force from a small electric motor. Here are some of its most common uses. You can also find a gear motor in many household appliances and vehicles.
Before selecting a gearmotor, consider the specifications of the machine you need to power. You should consider its size, weight, and ambient conditions, which include temperature regimes, noise levels, and contaminating sources. You should also take into account the envelope size, mounting method, and orientation. Other considerations include the expected service life, maintenance scope, and control type. The most suitable gearmotor for your specific application will be one that can handle the load.
The motor and gearbox types can be mixed and matched, depending on the application. A three-phase asynchronous motor and a permanent magnet synchronous servomotor are common choices for these devices. The type of motor and gearbox combination you choose will determine the power supply, the efficiency of the motor, and cost. Once you understand the application, it will be easy to integrate a gear motor into your system.
When used in industrial applications, gear motors are effective for reducing the speed of rotating shafts. One third of all industrial electric motor systems use gearing to reduce output speed. They can also save energy, which benefits the workers who operate them. In fact, industrial electric motor systems are responsible for nearly one-tenth of the carbon dioxide emissions that are produced by fossil-fueled power plants. Fortunately, efficiency and reliability are just two of the benefits of using gear motors.
Types
Before choosing a gearmotor, it is important to understand its specifications. The key factors to consider are the size, weight, and noise level of the gearmotor. Additionally, the power, torque, and speed of the motor are important factors. Specifications are also important for its operating environment, such as the temperature and the level of ingress protection. Finally, it is important to determine its duty cycle to ensure it will operate properly. To choose a suitable gearmotor, consult the specifications of your application.
Some common applications of gearmotors include packaging equipment, conveyors, and material handling applications. They also come with several advantages, including their ability to control both position and speed. This makes them ideal for applications where speed and positioning are crucial. Parallel-shaft gear units, for instance, are commonly used in conveyors, material handling, and steel mills. They are also able to operate in high-precision manufacturing. For these reasons, they are the most popular type of gearmotor.
There are three common types of gears. Helical gears have teeth that are inclined at 90 degrees to the axis of rotation, making them more efficient. Helicoidal gears, meanwhile, have a lower noise level and are therefore preferred for applications requiring high torque. Worm gears are preferred for applications where torque and speed reduction are important, and worm gears are suited for those conditions. They also have advantages over spur gears and worm gears.
The application of a gear motor is almost limitless. From heavy machine lifts to hospital bed lifting mechanisms, gear motors make it possible to use a small rotor at a high speed. Their lightweight construction also allows them to move heavy loads, such as cranes, but they do so slowly. Gear motors are an excellent choice in applications where space is an issue. A few common applications are discussed below. When choosing a gear motor, remember to choose the best size and application for your needs.
Functions
A gearmotor’s speed is directly proportional to the gear ratio. By dividing the input speed by the gear ratio, the output speed can be determined. Gear ratios above one reduce speed, while gear ratios below one increase speed. Efficiency of a gearmotor is defined as its ability to transfer energy through its gearbox. This efficiency factor takes into account losses from friction and slippage. Most gearmotor manufacturers will provide this curve upon request.
There are several factors that must be considered when choosing a gearmotor. First, the application must meet the desired speed and torque. Second, the output shaft must rotate in the desired direction. Third, the load must be properly matched to the gearmotor. Lastly, the operating environment must be considered, including the ambient temperature and the level of protection. These details will help you find the perfect gearmotor. You can compare various types of gear motors on this page and choose the one that will meet your needs.
The micro-DC gear motor is one of the most versatile types of geared motors. These motors are widely used in intelligent automobiles, robotics, logistics, and the smart city. Other applications include precision instruments, personal care tools, and cameras. They are also commonly found in high-end automotives and are used in smart cities. They also find use in many fields including outdoor adventure equipment, photography equipment, and electronics. The benefits of micro-DC gear motors are many.
The main function of a gear motor is to reduce the speed of a rotating shaft. Small electric clocks, for example, use a synchronous motor with a 1,200-rpm output speed to drive the hour, minute, and second hands. While the motor is small, the force it exerts is enormous, so it’s crucial to ensure that the motor isn’t over-powered. There is a high ratio between the input torque and the output torque.
Reliability
The reliability of a gear motor is dependent on a number of factors, including material quality, machining accuracy, and operating conditions. Gear failure is often more serious than surface fatigue, and can compromise personal safety. Reliability is also affected by the conditions of installation, assembly, and usage. The following sections provide an overview of some important factors that impact gear motor reliability. This article provides some tips to maximize gear motor reliability.
First and foremost, make sure you’re buying from a reliable supplier. Gear motors are expensive, and there is no standardization of the sizes. If a gear breaks, replacing it can take a lot of time. In the long run, reliability wins over anything. But this doesn’t mean that you can ignore the importance of gears – the quality of a gear motor is more important than how long it lasts.
Cost
The cost of a gear motor is relatively low compared to that of other forms of electric motors. This type of motor is commonly used in money counters, printers, smart homes, and automation equipment. A DC gear motor is also commonly used in automatic window machines, glass curtain walls, and banknote vending machines. There are many advantages to using a gear motor. Here are a few of them. Read on to learn more about them.
Speed management is another benefit of a gear motor. The motors tend to have less wear and tear than other motors, which means less frequent replacements. Additionally, many gear motors are easy to install and require less maintenance, which also helps reduce the overall cost of ownership. Lastly, because noise is a common concern for many electronic OEMs, DC gear motors are often quieter than their counterparts. For these reasons, they are often used in industrial settings.
Another advantage of an electric gear motor is its size and power. They are typically designed for 12V, 24V, and 48V voltages and 200-watt power. Their rated speed is 3000 rpm and their torque is 0.64 Nm. They are also more reliable than their AC counterparts and are ideal for many industrial applications. They have a high ratio of three to two, which makes them ideal for a variety of applications.
A gear motor is an electric motor that is coupled with a gear train. It uses AC or DC power, and is often called a gear reducer. The main purpose of these gear reducers is to multiply torque, while maintaining compact size and overall efficiency. However, the efficiency of a gear motor is also affected by ambient temperature and lubricants. If the gear motor is installed in the wrong location, it may be ineffective and result in premature failure of the machine.
editor by CX 2023-05-18
China Professional 36mm High Torque 5n. M 10n. M 24V Brushed Brushless BLDC Planetary Gearbox Gear Motor for Robot motor driver
Product Description
SHN Motors
1.Features
1) Step Angle Accuracy: ±5%
2) Resistance Accuracy: ±10%
3) Inductance Accuracy: ±20%
4) Temperature Rise: 80°C Max
5) Ambient Temperature: -20°C~+50°C
6) Insulation Resistance: 100MΩ Min., 500VDC
7) Dielectric Strength: 500VAC for 1 minute
8) Shaft Radial Play: 0.02Max (450g-load)
9) Shaft Axial Play: 0.08Max (450g-load)
2.Related Specifications
1) 42mm series
| Model | DMW421 | DMW422 | DMW423 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 5000 | 5000 | 5000 |
| Rated torque | Nm | 0.063 | 0.094 | 0.125 |
| Rated Speed | rpm | 4000 | 4000 | 4000 |
| Rated Current | A | 1.7 | 2.5 | 3.5 |
| Torque(max) | Nm | 0.19 | 0.27 | 0.38 |
| Back-EMF constant | V/Krpm | 3.13 | 3.13 | 3.15 |
| Torque Constant | Nm/A | 0.039 | 0.04 | 0.04 |
| Resistance | ohm | 1.5 | 0.53 | 0.74 |
| Weight | Kg | 0.3 | 0.4 | 0.5 |
| Length | mm | 41 | 51 | 6 |
2) 70mmSeries
| Model | Rated Voltage | No load speed |
Rated torque | Rated Speed | Rated Current |
Rated power |
L |
| VDC | RPM | Nm | rpm | A | W | mm | |
| DMW701 | 48 | 3500 | 0.5 | 3000 | 4.3 | 157 | 86 |
| DMW702 | 48 | 3500 | 1 | 3000 | 8.7 | 314 | 116 |
| DMW703 | 48 | 3500 | 1.5 | 3000 | 12.9 | 471 | 136 |
3) 80mmSeries
| Model | DMW801 | DMW802 | DMW803 | |
| Voltage | V | 24 | ||
| No load speed | rpm | 4200 | 4200 | 4200 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 5.2 | 10.5 | 15 |
| Rated power | W | 79 | 157 | 236 |
| Back-EMF constant | V/Krpm | 9 | 9.2 | 9.5 |
| Torque Constant | Nm/A | 0.06 | 0.052 | 0.05 |
| Resistance | ohm | 0.5 | 0.43 | 0.35 |
| Weight | Kg | 1.6 | 2.2 | 3 |
| Length | mm | 75 | 95 | 115 |
4) 86mmSeries
| Model | DMW861 | DMW862 | DMW863 | |
| Voltage | V | 48 | ||
| No load speed | rpm | 3500 | 3500 | 3400 |
| Rated torque | Nm | 1.0 | 1.8 | 2.5 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 8.6 | 14.8 | 20 |
| Torque(max) | Nm | 3.0 | 5.4 | 7.5 |
| Back-EMF constant | V/Krpm | 9.8 | 9.8 | 10 |
| Torque Constant | Nm/A | 0.13 | 0.13 | 0.14 |
| Resistance | ohm | 0.32 | 0.15 | 0.1 |
| Weight | Kg | 2.2 | 3.2 | 4.2 |
| Length | mm | 80 | 105 | 130 |
5) 60mmSeries
| Model | DMW601 | DMW602 | DMW603 | |
| Voltage | V | 36 | ||
| No load speed | rpm | 4100 | 4100 | 4100 |
| Rated torque | Nm | 0.25 | 0.5 | 0.75 |
| Rated Speed | rpm | 3000 | 3000 | 3000 |
| Rated Current | A | 3 | 6 | 9 |
| Torque(max) | Nm | 0.75 | 1.5 | 2 |
| Back-EMF constant | V/Krpm | 6.2 | 6.5 | 6.5 |
| Torque Constant | Nm/A | 0.043 | 0.045 | 0.041 |
| Resistance | ohm | 0.59 | 0.26 | 0.2 |
| Weight | Kg | 0.9 | 1.2 | 1.6 |
| Length | mm | 78 | 99 | 120 |
6) 57mm Series
| Model | DMW571 | DMW572 | DMW573 | DMW574 | ||
| Voltage | V | 36 | ||||
| No load speed | rpm | 5200 | 5200 | 5300 | 5400 | |
| Rated torque | Nm | 0.11 | 0.22 | 0.32 | 0.42 | |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 | |
| Rated Current | A | 1.8 | 3.2 | 4.7 | 6.5 | |
| Torque(max) | Nm | 0.3 | 0.5 | 0.8 | 1.2 | |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 | |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 | |
| Resistance | ohm | 1.7 | 0.75 | 0.5 | 0.39 | |
| Weight | Kg | 0.45 | 0.8 | 1.1 | 1.4 | |
| Length | mm | 55 | 75 | 95 | 115 | |
7) 57 High Torque
| Model | DMW571 | DMW572 | DMW573 | DMW574 | |
| Voltage | V | 36 | |||
| No load speed | rpm | 5200 | 5200 | 5200 | 5200 |
| Rated torque | Nm | 0.14 | 0.28 | 0.43 | 0.49 |
| Rated Speed | rpm | 4000 | 4000 | 4000 | 4000 |
| Rated Current | A | 2.2 | 4.5 | 6.8 | 7.9 |
| Torque(max) | Nm | 0.4 | 0.6 | 0.9 | 1.5 |
| Back-EMF constant | V/Krpm | 4.5 | 4.8 | 4.83 | 4.9 |
| Torque Constant | Nm/A | 0.072 | 0.078 | 0.08 | 0.09 |
| Resistance | ohm | 2 | 0.9 | 0.7 | 0.5 |
| Weight | Kg | 0.5 | 0.9 | 1.3 | 1.8 |
| Length | mm | 55 | 75 | 95 | 115 |
3.Outlines/Drawings
4.About US
5.Main Products
6.Package and Shipping
1.FedEX / DHL / UPS / TNT for samples,Door to door service;
2.By sea for batch goods;
3.Customs specifying freight forwarders or negotiable shipping methods;
4.Delivery Time:20-25 Days for samples;30-35 Days for batch goods;
5.Payment Terms:T/T,L/C at sight,D/P etc.
7.FAQ
Q1. When can I get the quotation?
We usually quote within 24 hours after we get your inquiry.
If you are urgent to get the price, please send the message on and or call us directly.
Q2. How can I get a sample to check your quality?
After price confirmed, you can requiry for samples to check quality.
If you need the samples, we will charge for the sample cost.
But the sample cost can be refundable when your quantity of first order is above the MOQ
Q3. Can you do OEM for us?
Yes, the product packing can be designed as you want.
Q4. How about MOQ?
1 pcs for carton box.
Q5. What is your main market?
Eastern Europe, Southeast Asia, South America.
Please feel free to contact us if you have any question.
| Application: | Universal, Industrial, Household Appliances, Car, Power Tools |
|---|---|
| Operating Speed: | Adjust Speed |
| Excitation Mode: | Excited |
| Function: | Control, Driving |
| Casing Protection: | Protection Type |
| Number of Poles: | 8 |
| Samples: |
US$ 100/Piece
1 Piece(Min.Order) | |
|---|
| Customization: |
Available
| Customized Request |
|---|

What Is a Gear Motor?
A gear motor is an electric motor coupled with a gear train. It uses either DC or AC power to achieve its purpose. The primary benefit of a gear reducer is its ability to multiply torque while maintaining a compact size. The trade-off of this additional torque comes in the form of a reduced output shaft speed and overall efficiency. However, proper gear technology and ratios provide optimum output and speed profiles. This type of motor unlocks the full potential of OEM equipment.
Inertial load
Inertial load on a gear motor is the amount of force a rotating device produces due to its inverse square relationship with its inertia. The greater the inertia, the less torque can be produced by the gear motor. However, if the inertia is too high, it can cause problems with positioning, settling time, and controlling torque and velocity. Gear ratios should be selected for optimal power transfer.
The duration of acceleration and braking time of a gear motor depends on the type of driven load. An inertia load requires longer acceleration time whereas a friction load requires breakaway torque to start the load and maintain it at its desired speed. Too short a time period can cause excessive gear loading and may result in damaged gears. A safe approach is to disconnect the load when power is disconnected to prevent inertia from driving back through the output shaft.
Inertia is a fundamental concept in the design of motors and drive systems. The ratio of mass and inertia of a load to a motor determines how well the motor can control its speed during acceleration or deceleration. The mass moment of inertia, also called rotational inertia, is dependent on the mass, geometry, and center of mass of an object.
Applications
There are many applications of gear motors. They provide a powerful yet efficient means of speed and torque control. They can be either AC or DC, and the two most common motor types are the three-phase asynchronous and the permanent magnet synchronous servomotor. The type of motor used for a given application will determine its cost, reliability, and complexity. Gear motors are typically used in applications where high torque is required and space or power constraints are significant.
There are two types of gear motors. Depending on the ratio, each gear has an output shaft and an input shaft. Gear motors use hydraulic pressure to produce torque. The pressure builds on one side of the motor until it generates enough torque to power a rotating load. This type of motors is not recommended for applications where load reversals occur, as the holding torque will diminish with age and shaft vibration. However, it can be used for precision applications.
The market landscape shows the competitive environment of the gear motor industry. This report also highlights key items, income and value creation by region and country. The report also examines the competitive landscape by region, including the United States, China, India, the GCC, South Africa, Brazil, and the rest of the world. It is important to note that the report contains segment-specific information, so that readers can easily understand the market potential of the geared motors market.
Size
The safety factor, or SF, of a gear motor is an important consideration when selecting one for a particular application. It compensates for the stresses placed on the gearing and enables it to run at maximum efficiency. Manufacturers provide tables detailing typical applications, with multiplication factors for duty. A gear motor with a SF of three or more is suitable for difficult applications, while a gearmotor with a SF of one or two is suitable for relatively easy applications.
The global gear motor market is highly fragmented, with numerous small players catering to various end-use industries. The report identifies various industry trends and provides comprehensive information on the market. It outlines historical data and offers valuable insights on the industry. The report also employs several methodologies and approaches to analyze the market. In addition to providing historical data, it includes detailed information by market segment. In-depth analysis of market segments is provided to help identify which technologies will be most suitable for which applications.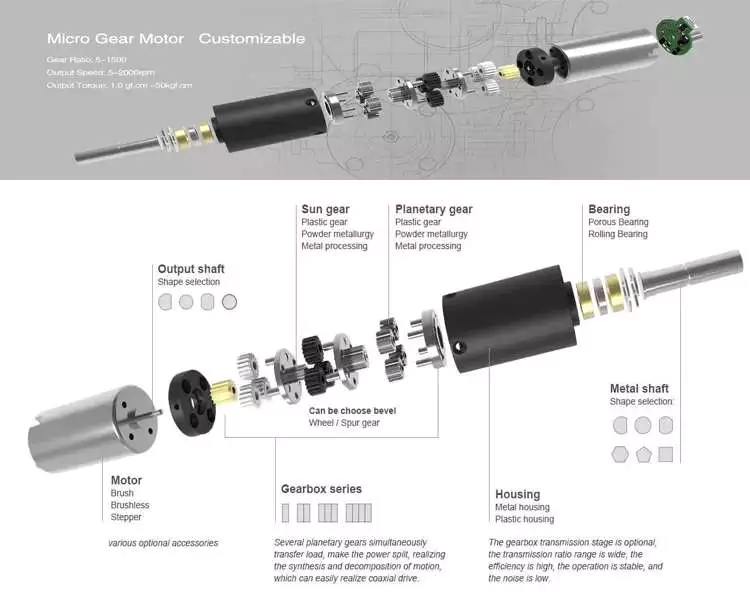
Cost
A gear motor is an electric motor that is paired with a gear train. They are available in AC or DC power systems. Compared to conventional motors, gear reducers can maximize torque while maintaining compact dimensions. But the trade-off is the reduced output shaft speed and overall efficiency. However, when used correctly, a gear motor can produce optimal output and mechanical fit. To understand how a gear motor works, let’s look at two types: right-angle geared motors and inline geared motors. The first two types are usually used in automation equipment and in agricultural and medical applications. The latter type is designed for rugged applications.
In addition to its efficiency, DC gear motors are space-saving and have low energy consumption. They can be used in a number of applications including money counters and printers. Automatic window machines and curtains, glass curtain walls, and banknote vending machines are some of the other major applications of these motors. They can cost up to 10 horsepower, which is a lot for an industrial machine. However, these are not all-out expensive.
Electric gear motors are versatile and widely used. However, they do not work well in applications requiring high shaft speed and torque. Examples of these include conveyor drives, frozen beverage machines, and medical tools. These applications require high shaft speed, so gear motors are not ideal for these applications. However, if noise and other problems are not a concern, a motor-only solution may be the better choice. This way, you can use a single motor for multiple applications.
Maintenance
Geared motors are among the most common equipment used for drive trains. Proper maintenance can prevent damage and maximize their efficiency. A guide to gear motor maintenance is available from WEG. To prevent further damage, follow these maintenance steps:
Regularly check electrical connections. Check for loose connections and torque them to the recommended values. Also, check the contacts and relays to make sure they are not tangled or damaged. Check the environment around the gear motor to prevent dust from clogging the passageway of electric current. A proper maintenance plan will help you identify problems and extend their life. The manual will also tell you about any problems with the gearmotor. However, this is not enough – it is important to check the condition of the gearbox and its parts.
Conduct visual inspection. The purpose of visual inspection is to note any irregularities that may indicate possible problems with the gear motor. A dirty motor may be an indication of a rough environment and a lot of problems. You can also perform a smell test. If you can smell a burned odor coming from the windings, there may be an overheating problem. Overheating can cause the windings to burn and damage.
Reactive maintenance is the most common method of motor maintenance. In this type of maintenance, you only perform repairs if the motor stops working due to a malfunction. Regular inspection is necessary to avoid unexpected motor failures. By using a logbook to document motor operations, you can determine when it is time to replace the gear motor. In contrast to preventive maintenance, reactive maintenance requires no regular tests or services. However, it is recommended to perform inspections every six months.
editor by CX 2023-05-17